第二部【企業情報】
第1【企業の概況】
1【主要な経営指標等の推移】
|
回次 |
第3期 |
第4期 |
第5期 |
第6期 |
第7期 |
|
|
決算年月 |
2019年7月 |
2020年7月 |
2021年7月 |
2022年7月 |
2023年7月 |
|
|
売上高 |
(千円) |
|
|
|
|
|
|
経常損失(△) |
(千円) |
△ |
△ |
△ |
△ |
△ |
|
当期純損失(△) |
(千円) |
△ |
△ |
△ |
△ |
△ |
|
持分法を適用した場合の投資利益 |
(千円) |
|
|
|
|
|
|
資本金 |
(千円) |
|
|
|
|
|
|
発行済株式総数 |
(株) |
|
|
|
|
|
|
普通株式 |
|
|
|
|
|
|
|
A1種優先株式 |
|
|
|
|
|
|
|
A2種優先株式 |
|
|
|
|
|
|
|
B種優先株式 |
|
|
|
|
|
|
|
C種優先株式 |
|
|
|
|
|
|
|
D種優先株式 |
|
|
|
|
|
|
|
純資産額 |
(千円) |
|
|
|
|
|
|
総資産額 |
(千円) |
|
|
|
|
|
|
1株当たり純資産額 |
(円) |
△ |
△ |
△ |
△ |
△ |
|
1株当たり配当額 |
(円) |
|
|
|
|
|
|
(うち1株当たり中間配当額) |
( |
( |
( |
( |
( |
|
|
1株当たり当期純損失(△) |
(円) |
△ |
△ |
△ |
△ |
△ |
|
潜在株式調整後1株当たり当期純利益 |
(円) |
|
|
|
|
|
|
自己資本比率 |
(%) |
|
|
|
|
|
|
自己資本利益率 |
(%) |
|
|
|
|
|
|
株価収益率 |
(倍) |
|
|
|
|
|
|
配当性向 |
(%) |
|
|
|
|
|
|
営業活動によるキャッシュ・フロー |
(千円) |
|
|
|
△ |
△ |
|
投資活動によるキャッシュ・フロー |
(千円) |
|
|
|
△ |
△ |
|
財務活動によるキャッシュ・フロー |
(千円) |
|
|
|
|
|
|
現金及び現金同等物の期末残高 |
(千円) |
|
|
|
|
|
|
従業員数 |
(人) |
|
|
|
|
|
|
(外、平均臨時雇用者数) |
( |
( |
( |
( |
( |
|
(注)1.当社は、連結財務諸表を作成しておりませんので、連結会計年度に係る主要な経営指標等の推移については記載しておりません。
2.「収益認識に関する会計基準」(企業会計基準第29号 2020年3月31日)等を第6期の期首から適用しており、第6期以降に係る主要な経営指標等については、当該会計基準等を適用した後の指標等となっております。
3.第3期以降は、機体開発等の先行投資に伴う研究開発費等の負担から経常損失及び当期純損失となっております。また、同様の理由により第6期及び第7期は、営業キャッシュ・フローがマイナスとなっております。
4.第3期及び第4期の持分法を適用した場合の投資利益については、関連会社が存在しないため記載しておりません。第5期の持分法を適用した場合の投資利益については、関連会社がありますが、損益及び利益剰余金その他の項目からみて重要性が乏しいため記載しておりません。
5.当社は、2024年3月19日開催の取締役会決議により、A1種優先株式、A2種優先株式、B種優先株式、C種優先株式及びD種優先株式のすべてにつき、定款に定める取得条項に基づき、2024年4月11日付で自己株式として取得し、その対価としてA1種優先株式、A2種優先株式、B種優先株式、C種優先株式及びD種優先株式1株につき普通株式1株を交付しております。また、当社が取得したA1種優先株式、A2種優先株式、B種優先株式、C種優先株式及びD種優先株式のすべてについて、2024年3月19日開催の取締役会決議により2024年4月11日付で会社法第178条に基づき消却しております。なお、当社は、2024年4月11日開催の臨時株主総会決議により、同日付で種類株式を発行する旨の定款の定めを廃止しております。
6.当社は、2021年11月11日開催の臨時取締役会決議により、2021年12月4日付で普通株式、A1種優先株式、A2種優先株式、B種優先株式及びC種優先株式のすべての株式1株につき100株の割合で株式分割を行い、また、2024年4月11日開催の臨時取締役会決議により、2024年4月12日付で普通株式1株につき100株の割合で株式分割を行っております。第6期の期首に当該株式分割が行われたと仮定し、1株当たり純資産額及び1株当たり当期純損失を算定しております。
7.1株当たり純資産額は、期末純資産額から優先株式払込金額を控除した金額を、期末発行済株式数で除して算出しており、期末純資産額より優先株式払込金額が大きくなったため、計算結果はマイナスとなっております。
8.1株当たり配当額及び配当性向については、配当を実施していないため記載しておりません。
9.潜在株式調整後1株当たり当期純利益については、第3期から第7期において1株当たり当期純損失であり、第3期から第5期において潜在株式が存在しないため、また、第6期及び第7期において潜在株式は存在するものの、当社株式は非上場であり、期中平均株価が把握できないため記載しておりません。
10.第3期から第7期の自己資本利益率については、当期純損失を計上しているため記載しておりません。
11.株価収益率については、当社株式は非上場であるため、記載しておりません。
12.第3期から第5期についてはキャッシュ・フロー計算書を作成していないため、キャッシュ・フローに係る各項目については記載しておりません。
13.従業員数は就業人員(当社から社外への出向者を除き、社外から当社への出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員を含む。)は年間の平均人員を( )内に外数で記載しております。
14.第6期及び第7期の財務諸表については、「財務諸表等の用語、様式及び作成方法に関する規則」(1963年大蔵省令第59号)に基づき作成しており、金融商品取引法第193条の2第1項の規定に基づき、ESネクスト有限責任監査法人の監査を受けております。
なお、第3期、第4期及び第5期については、「会社計算規則」(2006年法務省令第13号)の規定に基づき算出した各数値を記載しております。また、当該各数値については、金融商品取引法第193条の2第1項の規定に基づくESネクスト有限責任監査法人の監査を受けておりません。
15.当社は、2021年12月4日付で普通株式、A1種優先株式、A2種優先株式、B種優先株式及びC種優先株式のすべての株式1株につき100株の割合で株式分割を行っております。また、2024年4月12日付で普通株式1株につき100株の割合で株式分割を行っております。
そこで、東京証券取引所自主規制法人(現 日本取引所自主規制法人)の引受担当者宛通知「『新規上場申請のための有価証券報告書(Ⅰの部)』の作成上の留意点について」(2012年8月21日付東証上審第133号)に基づき、第3期の期首に当該株式分割が行われたと仮定して算出した場合の1株当たり指標の推移を参考までに掲げると、以下のとおりとなります。
なお、第3期、第4期及び第5期の数値(1株当たり配当額についてはすべての数値)については、ESネクスト有限責任監査法人の監査を受けておりません。
|
回次 |
第3期 |
第4期 |
第5期 |
第6期 |
第7期 |
|
|
決算年月 |
2019年7月 |
2020年7月 |
2021年7月 |
2022年7月 |
2023年7月 |
|
|
1株当たり純資産額 |
(円) |
△13.72 |
△26.69 |
△52.17 |
△79.46 |
△104.16 |
|
1株当たり当期純損失(△) |
(円) |
△11.07 |
△16.06 |
△30.50 |
△36.20 |
△46.74 |
|
潜在株式調整後1株当たり当期純利益 |
(円) |
- |
- |
- |
- |
- |
|
1株当たり配当額 (うち1株当たり中間配当額) |
(円) |
- (-) |
- (-) |
- (-) |
- (-) |
- (-) |
2【沿革】
現代表取締役の閔弘圭が2016年8月に、産業用の各種ロボットシステムのハードウェア及びソフトウェア、その他関連機器の企画・設計、開発・製造及び販売等を目的として株式会社Liberaware(資本金3,000千円)を設立いたしました。
|
年月 |
事業の変遷 |
|
2016年8月 |
千葉県千葉市若葉区に株式会社Liberawareを設立 |
|
2018年2月 |
三菱地所株式会社、丸の内熱供給株式会社と共に自律飛行ドローンによる非GPS環境かつ狭小空間である地下トンネル内の点検実験を実施 |
|
2018年4月 |
狭小空間点検用ドローン「IBIS」を開発 |
|
2018年6月 |
NEDO「高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発」に採択「非GPS環境下におけるドローンの群制御技術及びエネルギー効率向上を可能とする要素技術の研究開発」事業を推進 |
|
2018年6月 |
NEDO「AIシステム共同開発支援事業」に採択「AIドローンを用いたインフラメンテナンス関連サービス創出」事業を推進 |
|
2019年4月 |
IBISのレンタルサービスを開始 |
|
2019年11月 |
JR東日本スタートアッププログラム2019に採択 |
|
2020年3月 |
千葉県船橋市の図書館におけるAI蔵書点検システム試験導入にて、IBISによる書庫自動撮影検証を実施 |
|
2020年5月 |
SII「令和2年度補正予算産業保安高度化推進事業費補助金」に採択「巡回点検ドローンによる遠隔監視システムの構築」事業を推進 |
|
2020年5月 |
IBISにてJR新宿駅における駅舎天井裏点検の実証実験を実施 |
|
2020年10月 |
IBISのレンタルサービスに3次元化等の画像処理サービス等の新たなサービスを追加 |
|
2021年6月 |
JISSUI「令和2年度補正予算(3次補正)産業保安高度化推進事業費補助金」に採択「高度センシング技術による狭小空間専用小型ドローンの構築」事業を推進 |
|
2021年6月 |
セントラル警備保障株式会社と小型ドローンを活用した設備点検・監視巡回サービスを協業開始 |
|
2021年7月 |
鉄道・インフラ業界におけるデジタルツイン(注)の促進を目的として、東京都港区にJR東日本スタートアップ株式会社及びJR東日本コンサルタンツ株式会社との合弁会社であるCalTa株式会社を設立 |
|
2021年8月 |
情報加工や制御サービスを掛け合わせた共同ソリューション開発に向け凸版印刷株式会社(現 TOPPANホールディングス株式会社) と資本業務提携契約を締結 |
|
2022年5月 |
東京都港区に東京営業所を新設 |
|
2022年5月 |
CalTa株式会社がインフラ事業者のDX実現に向けたデジタルツインソフトウェアサービス「TRANCITY」をリリース |
|
2022年7月 |
日本製鉄株式会社の製鉄所内大型構造設備にてIBISの運用を開始 |
|
2022年8月 |
多様な顧客ニーズに対応するためにデジタルツイン事業を本格的に事業化 |
|
2022年8月 |
NEDO「次世代空モビリティの社会実装に向けた実現(ReAMo)プロジェクト」に参画し「制約環境下におけるドローンの性能評価法の研究開発」に関する「性能評価手法構築用ドローンプラットフォームの開発」を受託 |
|
2023年6月 |
狭小空間点検用ドローン「IBIS2」をリリース |
|
2023年8月 |
図面のない建物・設備のデジタル図面化に対応すべくBIMサービスを開始 |
|
2023年8月 |
スマート保安導入支援事業費補助金の交付を受け防爆認証特化型ドローンの開発に着手 |
|
2023年9月 |
総務省「マレーシアにおけるドローン及びデジタルツイン技術を活用したインフラ点検サービスの実証」に関する契約を締結 |
|
2023年12月 |
国土交通省の中小企業イノベーション創出推進事業「建設施工・災害情報収集における高度化 (省力化・自動化・脱炭素化)の技術開発・実証」に採択 |
|
2024年1月 |
令和6年能登半島地震において石川県輪島市内におけるドローンによる捜索や被災状況確認等の初期災害時支援活動を実施 |
|
2024年2月 |
国土交通省の中小企業イノベーション創出推進事業「安全・安心な公共交通等の実現に向けた技術の開発・実証」に採択 |
|
2024年2~3月 |
福島第一原子力発電所1号機格納容器内の内部調査を当社ドローンにより実施 |
(注) デジタルツイン
デジタルツインとは、IoTセンサなどを用いて物理空間から取得した情報を基に、デジタル空間に物理空間のコピーを再現する技術
3【事業の内容】
(ビジョン)
当社は、「見えないリスクを可視化する」というビジョンのもと、ドローン・ロボット等(以下「ドローン等」という。)により撮影したインフラ施設・設備等の映像情報を基に、顧客の安全性・生産性向上に資するデータへ加工して提供するソリューションを展開しております。インフラ等の老朽化や労働人口減少への対処が喫緊の社会課題であり、当社の提供するソリューションが当該課題を解決することにより、国内外企業の産業競争力の強化が図られ、ひいては、当社のミッションである「誰もが安全な社会を作る」の実現につながると考えております。
具体的には、ドローン等を軸としたハードウェア技術と、撮影画像・映像等の加工・処理・管理といったソフトウェア技術を用い、インフラ施設・設備等へのDXソリューションを提供するインフラDX事業という単一事業を行っております。
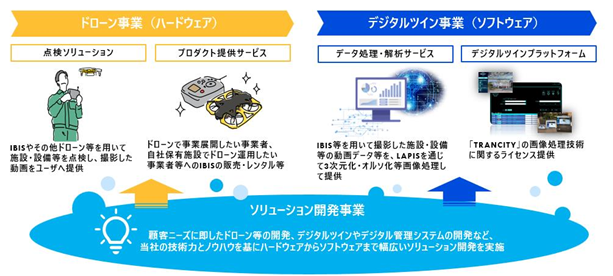
当該事業セグメントにおいて、ドローン等によるインフラ・プラントの調査・点検・測量に資するデータの提供や、ドローンの製造・販売を実施する「ドローン事業」と、ドローン等により取得したデータの画像処理技術等により、映像、3次元データ、異常検知に資する情報等をデジタル上に構築・提供する「デジタルツイン事業」、そして、両事業を支える事業として、当社の技術力やノウハウをベースにした新しいソリューションを開発する「ソリューション開発事業」を合わせた3つの事業を展開しております。

(当社の事業内容)
(1)ドローン事業
「ドローン事業」とは、自社開発した屋内専用の産業用小型ドローン「IBIS」を中心に、その他ドローン等のデバイスを活用し、ユーザーが抱える各種課題の解決に資するソリューションの提供を行う事業であります。
具体的には、調査・点検・測量等を目的としたドローン撮影画像の提供を行う「点検ソリューション」及び当該用途に供されるドローンの機体販売・レンタルを行う「プロダクト提供サービス」を展開しております。特に、ドローン等で撮影した画像は後述のデジタルツイン事業において、3次元化の基礎となる重要なデータとなります。
サービスの中核を構成するIBISは、製鉄業等における実現場での綿密な実証実験のもと開発された、屋内の暗所・狭小空間、鉄粉の舞う環境や高温環境での飛行に耐えうる防塵性・耐熱性を有した、20cm四方程度の大きさの小型ドローンとなります。転落リスクを伴う高所空間、狭小で点検員が進入できない空間、高温あるいは半水没環境、又は有毒性のガスが含まれているような空間といった、危険かつ点検が困難な箇所を人に代わって調査・点検を行うことが可能となります。このような環境は国内外に数多く存在しており、IBISは「狭く、暗く、危険な」環境においても接近目視と同等の調査・点検を実現しております。
「ドローン事業」においては、下記のサービスを展開しております。
|
点検ソリューション |
今まで人が立ち入ることができなかった場所や人が入ると危険な空間にIBIS等が人に代わって調査・点検し、撮影した施設・設備等の動画をユーザーへ提供するサービス |
|
プロダクト提供サービス |
ドローンで事業展開したい事業者や自社保有施設でドローンを運用したい事業者などへ当社プロダクトIBIS等を販売・レンタルするサービス (機体販売) IBISと必要備品一式を販売するサービス。修理サービスや講習会サービスも提供 (レンタルサービス) IBISと必要備品一式を月額レンタルするサービス。修理サービスや講習会サービスも提供 |
点検ソリューションの主要顧客は製鉄業・鉄道業・建設業・製造業・官公庁等で、過年度より継続して利用しているエンドユーザーが占める売上高割合(継続顧客の売上高割合)は2023年7月期において70%を超えており、リカーリング性が高いという特徴があります。また、プロダクト提供サービスにおける、2023年6月にリリースしたIBISの次世代機「IBIS2」の提供セット数は2024年5月末時点で61セットとなっており、そのうち、2024年7月期から本格的に開始した機体販売は28セット(レンタルバック取引(※1)に利用した機体販売6セットを含む)、レンタルサービスのレンタルセット数は33セットとなっております。
なお、継続顧客の売上高割合は点検ソリューション(関連するデータ処理・解析サービス含む)における2022年7月期のエンドユーザーのうち、2023年7月期にも受注のあったエンドユーザーの売上高を点検ソリューション全体の売上高で除して算定しております。
(2)デジタルツイン事業
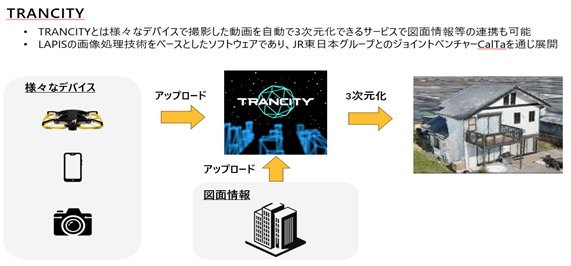
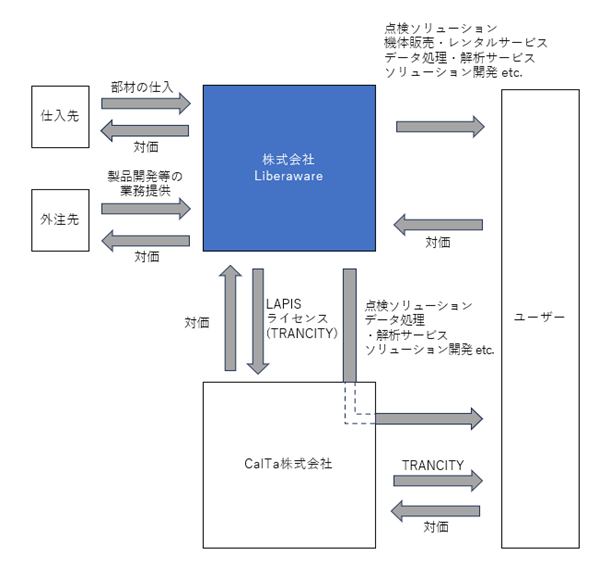
「デジタルツイン事業」とは、当社の関連会社であるCalTa株式会社(以下「CalTa」という。)が提供するソフトウェアTRANCITY(以下「TRANCITY」という。)や、その基幹システムを構成する当社のソフトウェアLAPIS(※2)を用いて、デジタルツインサービスを提供する事業となります。それらのソフトウェアを活用し、映像及び映像以外の周辺情報(例えば、ガス濃度、温度など、ドローン等から取得した情報等)を、デジタルツイン(※3)のプラットフォーム上に構築することで、顧客が設備の維持管理や建設現場の管理などを行う上で必要となる様々な情報の一元管理を支援しております。
TRANCITYの顧客は、鉄道業・建設業が中心で、インフラ及び設備の維持管理のためには時系列でデータを保管することが有用となります。そのため、当社のサービスを用いてデータを保管し続けることが想定されることから、他社サービスへスイッチしにくく、継続利用が見込めるサービスであります。
なお、「デジタルツイン事業」においては、下記のサービスを展開しております。
|
データ処理・解析サービス |
IBISを用いて撮影した施設・設備等の動画データ等を基に、LAPISを通じて3次元化・オルソ化(※4)等のデータ加工処理や3次元データの解析(経年変化解析や異常検知等)、BIM(※5)等のデジタル図面化を提供するサービス。また、IBISによる撮影データだけではなく、屋外用ドローンにより撮影した動画データやレーザースキャナによる3次元データを加工、解析するサービスも提供 |
|
TRANCITYプラットフォーム |
CalTaの提供するTRANCITYの画像処理に関するライセンス提供 |

(3)ソリューション開発事業
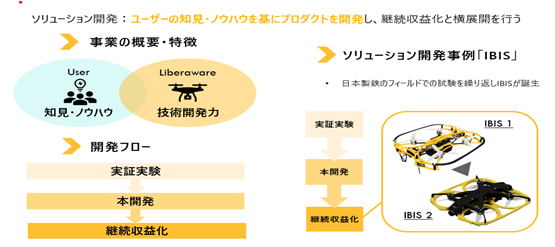
「ドローン事業」「デジタルツイン事業」を展開する上で源泉となる事業であり、インフラ・プラント業界や建設業界等の企業に対し、効率化・省力化・省人化のニーズに応じたドローン等の開発やデジタルツインプラットフォームの開発、ユーザー保有施設のデジタル管理ソフトウェアなど、当社の技術力とノウハウを基にハードウェアからソフトウェアまで幅広いソリューションを自社開発にて提供する事業となります。
当事業では、導入にあたり顧客企業からのヒアリングや情報分析を徹底して行うことで課題を深く理解し、当該理解を基に活用方針を明確にし、実証実験や試作開発、本開発、さらには事業化後の継続開発まで、長期にわたり顧客企業と協同し、課題解決に取り組んでおります。
これまでに、日本製鉄株式会社(以下「日本製鉄」という。)との高温環境対応ドローンの開発や、東京電力グループとの高放射線環境下でのドローンの活用といった特殊環境特化型ドローンの共同開発等を行っており、現在も開発を継続しております。また、後述するTRANCITYもJR東日本グループから受託したソリューション開発が発端となっています。ドローンの開発にとどまらず、ロボットやデジタルツインを主とした新たなサービスの源泉となる開発を進めております。
(関連会社の概要)
CalTaは、JR東日本スタートアップ株式会社、JR東日本コンサルタンツ株式会社及び当社が出資し、2021年7月に設立された企業となります。東日本旅客鉄道株式会社(以下「JR東日本」という。)をはじめとした鉄道・インフラ業界は、施設・設備の老朽化と労働力減少の背景から建設工事・維持管理などの生産性向上が急務であります。その課題解決のため、IBIS等を用いた施設の撮影サービス事業、IBIS等のドローン・ロボットの技術等により取得した情報をデジタルツインで表現し、施工管理や維持管理に資する情報を提供するソフトウェアサービスTRANCITY事業、及び受託開発事業を展開しております。
TRANCITYは、JR東日本グループが長年研究・蓄積していた施工管理や設備維持管理の現場における技術ノウハウと、当社の画像処理技術をベースに構築されたデジタルツインのソフトウェアサービスであり、取得した情報の時系列管理、測量、CAD(※6)化、BIM化、差分分析(※7)等を行えるサービスであります。類似サービスと比較し、より現場業務にフィットしたソフトウェアであり、鉄道業を中心に、製鉄業・通信業などにも活用が広がっております。
当社は、CalTaがエンドユーザーから獲得した設備等の調査・点検業務や受託開発案件等の全部または一部の受託、TRANCITYの画像処理に係るライセンス供与や当該ソフトウェアの構築・アップデートを行っております。2024年5月末時点でのライセンスの供与数は100件であります。
・TRANCITYの特徴
TRANCITYの特徴としては、鉄道業における現場の建設管理・維持管理に特化したUI/UX(※8)の構築、及び機能性が挙げられます。
UI/UXについては、TRANCITYは、CalTaを通じ実質的にはJR東日本グループが監修したプロダクトであり、建設現場・維持管理現場での利用を念頭に、現場の方が直感的に操作でき、情報の連携が容易で、時系列でのデータ管理・保存を行い、位置情報との紐づけが行える機能を有しております。2023年6月には、さらなる利便性の向上に向け、360°カメラへの対応も実現しております。
機能性については、現場ではスマートフォンやタブレットなどでの利用が想定され、それらの端末で使用するために、クラウド上で、低遅延でストレスなく操作できることや、SfM技術(※9)を活用した動画・静止画情報からの3次元化が求められます。TRANCITYは、それらに対応でき、また、SfM技術を応用したBIMサービスの展開もしております。サービスの対象となる業界に特化したプロダクトを作りこむエンジニアの開発力もまた、技術的な強みの一つであります。
(競争力の源泉)
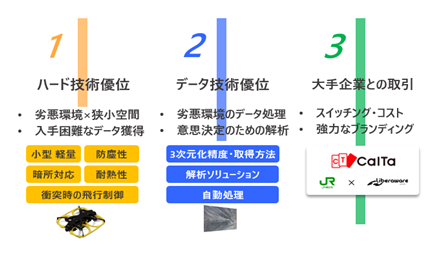
(1)ハードウェア、ソフトウェア及びサービスの強み
当社は、ハードウェア及びソフトウェアともに自社開発によりサービス構築を行い、顧客ニーズに応じたソリューションを提供することにより、屋内狭小空間での飛行実績及び撮影画像データを積み上げてきたことで、以下のような強みを有しております。
|
屋内ドローン飛行を可能とする技術力 |
当社のドローンIBISは、「狭く・暗く・危険な」環境における画像データの取得を可能としている屋内狭小空間に特化したドローンであり、そのような環境での飛行・撮影に資する多くの技術を組み合わせることで、機体の優位性を確保できていると考えています。 具体的には、屋内という暗く、粉塵等が舞い、配管やダクト等の障害物の多い空間の飛行は、屋外に比べ様々な制約があることから技術的なハードルが高く、また、天井裏等のより狭い空間の飛行には小型化が必須であるため、カメラ・モーター・プロペラ・バッテリー等の各部品をそれぞれ独自に設計する技術も必要となりますが、IBISはそれらの技術課題を乗り越え生み出された機体であります。 |
|
屋内外の重要設備撮影情報の解析技術と他社連携 |
狭小空間は、暗く、粉塵等の障害物が多いため、撮影データの3次元化等の画像処理が極めて困難な空間ですが、LAPISは、独自のアルゴリズムを構築することで、当該環境下においても顧客の求める形で画像処理を行うことができます。 また、当該画像処理技術は屋内外等の環境を問わず利用が可能となっており、当社の得意とする狭小空間においては、IBISと当社サービスを用いますが、それ以外の空間においては、他社ドローン等と当社サービスとの連携を積極的に進めております。屋内狭小空間のデータは、画像処理時のノイズ情報である粉塵が舞う空間が多く、また、暗所であることも多く十分な照度を確保できないことから、そのような環境に特化したドローンでなければ情報を得ることは容易ではありません。そのため、当社は屋内外の撮影情報を網羅的に取得できることが、競合他社と比べた当社の強みであると考えております。 |
|
屋内狭小空間における飛行・画像撮影実績 |
長年、屋内における小型かつ非GPS環境(※10)下での事業展開を行っているため、屋内におけるドローンの利活用実績を多く有しており、ユーザーとしては、製鉄会社・鉄道会社などの固定資産の多い重厚長大型産業に属する企業が中心です。他の機体では撮影できないプラントやインフラでの豊富な利活用実績を通じて、ハードウェアとソフトウェアの技術開発を進められていること、及び他社が有していない屋内における重要設備のドローン撮影画像データ蓄積及び撮影ノウハウが強みとなっております。 |
上記に加えて、JR東日本グループや日本製鉄とは、長年にわたり取引関係を築いていることも、当社の強みの一つと捉えています。JR東日本グループに対して、また、他の鉄道事業者に対しては、CalTaを通じて各種サービスの提供をしており、日本製鉄とも設立初期より共同研究等を行い深い関係が構築できております。これらの会社が当社サービス利用先となっていることに加え、JR東日本グループや日本製鉄等が蓄積してきた設備データやノウハウを基にサービス開発を行えていることも強みの一つと捉えております。
(2)当社の技術的な強み
当社は、ドローン等を開発するハードウェア技術、及びドローン等のデバイスで取得した映像情報等のデータ処理や解析、デジタルツインプラットフォームといったデジタル管理システムの開発等のソフトウェア技術を合わせ持ち、それらを一気通貫で実行できる開発体制を有しております。そのため、営業やプロダクトマネージャーが得たユーザーニーズを、各技術スペシャリストの検討のもと、正確に開発項目・要件・仕様に落とし込むことで、ユーザーニーズにフィットした製品・サービスを開発することが可能であります。
特に当社がターゲットとするユーザーは、インフラやプラント、建設業界等に属する事業者であり、当該ユーザーが従事する環境は「狭く・暗く・危険」であることも多いため、そのような環境に耐えうる仕様の製品・サービスを開発する必要があります。
①ハードウェア技術
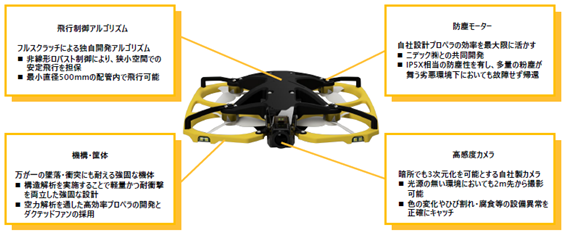
当社は、前述のとおり、ハードウェアからソフトウェアまで一気通貫した開発体制を構築していることから、ユーザーに対してユーザビリティの高い製品・サービスを提供できております。特に、当社が技術的に強みを有する開発領域は、製品をユーザー各々の環境で使用可能とするために最適化された「機体制御技術」「機体設計技術」であります。
・「機体制御技術」
当社が相対するユーザーニーズで最も多いのは、人による点検が困難な屋内狭小空間でのドローン等による調査・点検等であります。屋内狭小空間での飛行は、施設や設備の破損リスクがあるため、飛行安定性を担保するための「飛行制御アルゴリズム」が重要となります。
また、人手不足に対するニーズも多く、当該ニーズに対しては、人の手を介さずにドローン等が自律的に飛行する自律型ドローンによる点検等であり、そこでは「自律化技術」が重要となります。
■飛行制御アルゴリズム
IBISが利用される環境は、閉鎖環境ゆえ、周囲が壁等で囲まれており、かつ壁や天井までの距離が非常に短い空間となっております。例えば、直径50cm(IBISは縦横20cm四方程度の大きさであり、その2倍程のサイズ)の配管内で利用されることもありますが、閉鎖環境での飛行は、機体自身が吹き下ろす風が壁や床などに反射し、常に風による外乱ノイズに晒されるため、当該外乱ノイズへのフィードバック制御(※11)が重要となります。
当社では、IBISの飛行制御に非線形ロバスト制御(※12)を採用しており、一般的に用いられるPID制御(※13)と比較した際、耐風性に優れ、閉鎖環境で安定的に飛行できる優れた性能を有しております。
■自律化技術
当社は、これまで様々な自律飛行技術を基に現場での適用検証を実施しました。特に、自律飛行を実現するために、LiDAR SLAMやVisual SLAM、モーションキャプチャ等の技術により、非GPS環境である屋内空間での自律型ドローンの開発・検証を行いました。他には、オプティカルフローセンシング(※14)やUWB(※15)等のGPSに依存しない位置推定技術の開発・検証を行いました。
これらの技術により、ドローンが屋内空間を自律飛行することが可能となりますが、当社はプラントやオフィス等を巡回点検するドローンや、巡回業務を繰り返すための自動充電装置、複数のドローンを遠隔監視・安全運航監視する仕組み、巡回点検データを一括管理する管制システムなどを独自で開発しております。これまでに、上述の自律化技術を組み込んだドローンにより、建設施工現場における施工進捗の遠隔管理や、水力発電所における水漏れや異常発熱、メーター監視など発電設備の巡回監視などに取り組んでおります。さらに、ドローンが取得したデータにAI解析技術を活用してメーター自動読み取り機能や水漏れ検知する機能など、自動的に異常を検知するシステムも合わせて開発を行っております。

・「機体設計技術」
当社のドローン等が利用される環境は狭小空間や閉鎖空間が多いため、ドローン等の小型化、軽量化が求められます。一方で、人の代替として利用されるためには、ドローン等に搭載する要素部品は高機能、高品質であることが必要となります。そのため、当社では、強度を高く保ちつつ小型で軽量な「機構・筐体」の開発や、粉塵が舞う過酷な環境で故障しないための「モーター」、暗所でも鮮明な撮影データを取得するための「カメラ」といった要素部品の開発にも注力しております。
■機構・筐体
当社のIBISが利用される環境は、例えば天井裏やボイラー内、配管内などの狭小空間となります。しかしながら、天井裏のような複雑に入り組んだ空間を飛行する際、コンシューマー向けドローンに搭載されている衝突回避機能は、周囲にある配線・配管等の物体に対して常にセンサが反応してしまうため、操縦の障害となり機能しないことから、当社は、機体に衝突回避機能を持たせるのではなく、壁や天井、障害物等に衝突しても安定して飛行を継続できるよう、独自の機体構造を設計しております。
また、万が一墜落が起こった際に、再離陸・再飛行を可能とする強度を保ちながら、人や設備への損傷が限りなく少なくなるよう、小型で軽量な機体設計を実現しております。
なお、プロペラを自社開発するにあたり、プロペラの周囲で発生する気流の解析と試作開発を自社で行うことで機体の密接な解析・検証を行い、IBISに適した高効率なプロペラの開発を実現しております。
■要素部品
カメラ
IBISを利用して点検等を行う環境は、その多くが、照明や日光が届かず暗い空間であります。そのような空間において、より明るく鮮明な映像を撮影するため、当社では、ソニー株式会社製のSTARVISセンサ(※16)を搭載した高感度カメラを開発しております。
さらに、当社開発の高感度カメラは、暗い環境で明るく鮮明に撮影できるだけでなく、画像処理に適した調整が施されており、SfMによる3次元点群(※17)の作成や、ひび割れ腐食等の検出性能向上に寄与しています。
モーター
一般に、多くのドローンに用いられているブラシレスモーター(※18)は、小型かつ高出力を実現するため、動作中は積極的に外部からの空気を取り入れコイルの冷却を行うことから、モーターに冷却用の穴や隙間を有する構造が採用されております。
しかしながら、IBISが利用される発電プラントの設備内部、製鉄所の設備内部、天井裏等の環境は、多くの鉄粉や粉塵が舞う過酷な環境であります。一般的な仕様のモーターでは、鉄粉や粉塵が冷却用の穴や隙間から内部に入り込むため、破損の可能性や動作不良のリスクが高くなります。IBISは、当社とニデック株式会社で共同開発した専用の防塵モーターを採用することにより、そのような過酷な環境においても故障リスクが僅少なため、安定運用が可能な仕様となっております。
また、自社開発の専用プロペラの特性に合わせてモーター開発を行っており、プロペラの空力特性(※19)を最大限に発揮することが可能であり、小型であるにもかかわらず、高出力・高効率を実現しております。
②ソフトウェア技術
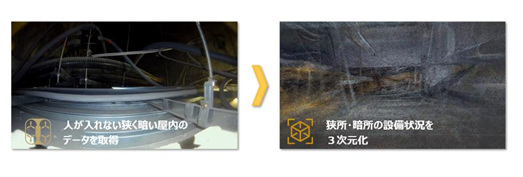
当社は、人の進入が困難な天井裏やボイラー内、配管内などの狭小空間や閉鎖空間といった、従来は調査・点検が困難であった多くの環境に係るデータを取得してきております。そして、取得したそれらのデータを基に、3次元化を核とした高度なデータ解析技術を開発することで、インフラやプラント、建設業界等の分野で求められる「狭く、暗く、危険な」作業環境の「見える化」を実現し、ユーザーの課題解決に取り組んでおります。
・狭小空間、閉鎖空間における画像処理・解析技術
IBISにより、暗く、障害物や粉塵が多い環境のデータを数多く取得、解析することで、そのような環境の画像処理に特化した独自のアルゴリズムを開発し、一般的な画像処理技術と比較し、より鮮明な3次元データを生成する技術を構築しております。また、3次元データを生成するだけでなく、IBISに搭載したサーモカメラやガス検知センサによって取得した温度情報、ガス情報を3次元データと統合することで、視覚情報だけでは検知することが難しい水漏れやガス漏れなどの異常検知を可能としております。
・3次元解析クラウド「LAPIS」
当社は、独自の画像処理・解析技術を活用して、映像データから3次元データを自動生成するクラウド「LAPIS」を開発しました。ユーザーは映像データを「LAPIS」へアップロードするだけで、手間をかけることなく簡単に3次元データを生成することが可能となります。さらに、蓄積した解析に関する独自のノウハウを基に、例えば、過去と現在の3次元データの差分を検知することで異常個所を特定する機能や、粉状の在庫の体積を計算する機能などの拡張開発に取り組んでおります。
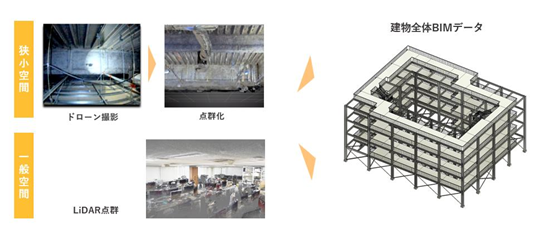
・図面がないインフラや設備等のBIMデータ生成技術
竣工から長い時間が経過したインフラや設備等は、図面が残っていないもしくは図面が更新されていないことにより、設備トラブルの原因把握が困難であったり、補修工事が非効率などという課題を抱えていることが多くあります。また、建設済みの設備は天井裏など人が入れない環境も多くあり、建設後の図面作成は容易ではありません。
当社は、IBISとその他データ取得機器を併用して3次元データを生成し、さらにBIMなどの図面データを生成する技術を有しており、狭小空間、閉鎖空間に特化した独自の画像処理技術とBIMデータ生成技術を組み合わせ、人が入れない環境を含む設備全体を図面化することで、上述の課題解決に取り組んでおります。
(3)コア技術に関する知財確保
当社は、企業競争力・事業競争力の確保を企図し、競合他社が市場参入してきた際の防御策として、ドローンを構成する要素の中で、筐体設計に係る耐久性向上技術や、モーターの放熱に係る安全性向上技術に関して、下記の知財を確保しております。
(耐久性向上技術:特許第6554731号 フレーム組立体)
当社の強みである機体等の「小型化」及び「軽量化」を実現するための、ドローンの筐体について特許を取得しております。本特許は、トップフレームとボトムフレームを設け、振動源であるモーターを支えるための剛性と軽量を両立させるための機構であります。また、トップフレームとボトムフレームをサイドフレームで繋ぐことで、衝突時や墜落時の耐衝撃性に強い構造を実現し、なおかつ軽量であるため、墜落時に空気抵抗によって落下速度を減速させる効果も有しております。
(安全性向上技術:特許第6589100号 フレーム組立体)
IBISが飛行する環境には、製鉄所等の炉やボイラーの内部といった、非常に高温な環境が多くあります。一方、ドローン等に付属するモーターは、駆動することにより発熱し、一般には空気中に放熱されますが、当該高温環境においては、自然放熱では冷却が追いつかず、モーターの発熱に起因した故障が頻発いたします。本特許は、モーターの発熱時に、ボトムプレートに内包する金属板を通すことにより、放熱面積を増やし、冷却性を高めるものとなります。また、プロペラによって吹き下ろされる風によりボトムプレートの冷却が行われ、放熱のみならず冷却も同時に実現することを可能としております。
(基幹技術:特許第7240676号 粒子捕捉器及びこれを備えた回転翼機)
IBISが利用される環境は「狭く・暗く・危険」であり、現場によっては目に見えない微小粒子状物質が舞う環境であります。そのため、点検員の健康に被害を与える可能性があり、人が立ち入る前の1次点検としてドローンによる空間環境の健全性を計測する手法の開発を国立大学法人東海国立大学機構名古屋大学との共同研究にて行っております。
当該発明はプロペラの表面に特殊加工を行うことにより、採取したい特定の粒子のみを採取することができ、ドローンが飛行する際に吹き下ろす風を利用することにより効率的に特定粒子の採取を行うものであります。
そのほかにも、今後は応用技術やAI関連技術の領域においても研究開発を推し進め、知財の確保等を進めてまいります。
(4)大手との取引
・JR東日本グループ
JR東日本のグループ会社が出資し、当社の関連会社でもあるCalTaを通じ、当社は、JR東日本グループ関連の案件を多数受注しております。CalTaへの売上高は、2022年7月期は52百万円、2023年7月期は74百万円であり、2024年7月期以降も継続的な成長を見込んでおります。
CalTaの運営に係り重要となる契約は、同社の株主であるJR東日本コンサルタンツ株式会社・JR東日本スタートアップ株式会社・当社間の合弁契約と、同社と当社間のTRANCITYに係るライセンス契約の2つとなります。
なお、合弁契約においては、CalTaの重要な意思決定に係る協議・決定ルールを定めており、当該契約の定めに従い、当社は社外取締役として代表取締役の閔弘圭、監査役に当社従業員を派遣しております。
・日本製鉄グループ
当社は、機体の開発に着手した2016年より、日本製鉄のフィールドを借り、耐環境性、ユーザビリティの高いドローンの開発を進めてきており、同社とは継続的な取引関係にあります。
当社は、日本製鉄のグループ会社や、製鉄所における協力会社・商社等を通じ、日本製鉄関連の案件を多数受注しております。サービス開始の2019年から継続した取引実績があり、直近2年の取引実績は、2022年7月期が42百万円、2023年7月期が33百万円であり、今後も継続的な受注を見込んでおります。また、2024年7月期以降は営業体制を再整備し、日本製鉄に対してはアカウント営業に徹する方針にしており、より一層の受注拡大を目指しております。
なお、上述の取引実績は日本製鉄グループがエンドユーザーとなる取引を集計しているため、「第2 事業の状況 4.経営者による財政状態、経営成績及びキャッシュ・フローの状況の分析 ④生産、受注及び販売の実績c.販売実績」の集計方法と一致しておりません。
・東京電力グループ
当社は、東京電力ホールディングス株式会社の福島第一廃炉カンパニー等をエンドユーザーとした受託開発プロジェクトを過年度より継続して実施しております。
福島第一廃炉カンパニーとは、廃炉内の状況を把握し、今後実施が見込まれる廃炉処理を安全・適切に進めることを最終目的としており、社会的意義の非常に高い事業であると考えております。
(5)産学官連携による研究開発推進及び事業化推進
当社が身を置くドローン市場やデジタルツイン市場は、ドローンやそのシステムを構成するハードウェア・ソフトウェアの各関連領域において、めまぐるしい関連技術の発展とサービス創出がなされている状況であります。
このような状況において、「誰もが安全な社会を作る」という大きなミッションに向けて、当社が各分野でのリーディングカンパニーとしての地位を獲得するには、最先端の技術を取り入れ、継続的に研究開発を行っていくことが不可欠と考えております。
そのために当社は、省庁、自治体、大学、その他外部の研究機関や民間企業と積極的に産学官連携を行い、研究開発推進並びに事業化推進をしております。
当社が過去、現在と取り組んできた主な産学官連携プロジェクトは以下のとおりであります。
|
国家プロジェクト |
目的 |
概要 |
|
国土交通省 中小企業イノベーション創出推進事業(SBIRフェーズ3事業) 「安全・安心な公共交通等の実現に向けた技術の開発・実証」 テーマ:鉄道施設の維持管理の効率化・省力化に資する技術開発・実証 |
事業化推進 |
鉄道環境に対応したドローンを用いた鉄道点検ソリューションの構築を目指し、コンソーシアムメンバーや協力会社と連携して事業を推進中 補助金の最大交付額は52億円 |
|
国土交通省 中小企業イノベーション創出推進事業(SBIRフェーズ3事業) 「災害に屈しない国土づくり、広域的・戦略的なインフラマネジメントに向けた技術の開発・実証」 テーマ:建設施工・災害情報収集における高度化(省力化・自動化・脱炭素化)の技術開発・実証 |
事業化推進 |
建設現場における施工管理の省力化・高度化技術の開発を目指し、コンソーシアムメンバーや協力会社と連携して事業を推進中 補助金の最大交付額は4.7億円 |
|
JWAC 令和4年度補正スマート保安導入支援事業費補助金(技術実証支援) 防爆認証特化型ドローンによるプラント点検ビジネス構築事業 |
研究開発推進 |
コンソーシアムメンバーや協力企業と連携し、日本初の防爆認証取得を目指し、防爆認証特化型ドローンの開発を実施 |
|
NEDO 次世代空モビリティの社会実装に向けた実現(ReAMo)プロジェクト 制約環境下におけるドローンの性能評価法の研究開発 |
事業化推進 |
ドローンの評価手法の標準化を目指し、複数の研究機関や関係省庁と連携し、事業を推進中 |
|
総務省 マレーシアにおけるドローン及びデジタルツイン技術を活用したインフラ点検サービスの実証 |
事業化推進 |
マレーシア国の新規顧客開拓に向け、ドローンPoC並びにICT人材育成スキーム構築 |
|
JISSUI 令和2年度補正予算(3次補正)産業保安高度化推進事業費補助金 高度センシング技術による狭小空間専用小型ドローンの構築事業 |
研究開発推進 |
サーモセンサー並びに有毒ガス検知センサーを備えたドローンを実現 |
|
SII 令和2年度補正予算 産業保安高度化推進事業費補助金 巡回点検ドローンによる遠隔監視システムの構築事業 |
研究開発推進 |
巡回点検用ドローン・システムの構築に向けて、ドローン、システム並びにアプリ開発し、その基幹技術を獲得 |
|
NEDO AIシステム共同開発支援事業 AIドローンを用いたインフラメンテナンス関連サービス創出事業 |
研究開発推進 |
故障検知AIを構築し、故障に備えたドローンを実現 |
|
NEDO 高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発 非GPS環境下におけるドローンの群制御技術及びエネルギー効率向上を可能とする要素技術の研究開発 |
研究開発推進 |
群制御技術、防塵モータ、防塵モーターに最適なプロペラ等を備えたドローンを実現 |
※国家プロジェクトにおいては、各プロジェクトにおいて発生した研究開発費用について、管轄機関の監査を受けており、認められた金額のみを助成金又は補助金として収受しております。なお、助成金又は補助金に関して、新規技術の研究開発に係るものについては、営業外収益として計上しております。また、既存の当社技術を用いて、委託された研究や実証実験を行うことが主目的となるものについては、売上高として計上しております。
|
大学連携 |
目的 |
概要 |
|
国立大学法人千葉大学 |
研究開発推進 |
屋内飛行に向けた制御開発を推進中 |
|
国立大学法人東海国立大学機構名古屋大学 |
研究開発推進 |
自律型ドローン開発及びプロペラエアフィルタ開発を推進中 |
|
自治体連携 |
目的 |
概要 |
|
東京都 |
事業化推進 |
「UPGRADE with TOKYO」スタートアップと東京都で都政課題の解決に向けた協働取組み先として選出され、ドローンと3次元モデルを用いた工事出来形確認手法構築のための取組みを実施 |
|
事業化推進 |
「現場対話型スタートアップ協働プロジェクト」に採択されドローン等を用い庁舎施設の3次元モデル作成を実施 |
|
|
神戸市 |
事業化推進 |
「Urban Innovation KOBE +P」事業の一環として水道施設(配水池内部)点検の実証実験を実施 |
|
北九州市 |
事業化推進 |
「スタートアップSDGsイノベーショントライアル事業」実証支援プログラムに採択されドローンを活用した危険物除去の実証実験を実施 |
|
千葉市 |
事業化推進 |
トライアル発注に採択され、千葉市との連携強化並びにインフラ点検案件を獲得 |
・用語解説
本項「3 事業の内容」において使用しております用語の定義について以下に記しております。
|
No. |
用語 |
用語の定義 |
|
※1 |
レンタルバック取引 |
販売を行った機体について販売先と当社とでレンタル契約を結び、当社より第3者のユーザーへレンタルを行う取引を指す |
|
※2 |
LAPIS |
当社独自で開発した、屋内点検用小型ドローン「IBIS」で撮影した動画データを管理し、その動画から画像処理された3次元化データも一元管理することができるクラウドサービスを指す |
|
※3 |
デジタルツイン |
IoTセンサなどを用いて物理空間から取得した情報を基に、デジタル空間に物理空間のコピーを再現する技術 |
|
※4 |
オルソ化 |
ドローン、ラジコンヘリ、航空機、人工衛星等から中心投影として撮影された空中写真画像を補正し、正射投影された空中写真画像を作成する作業を指す |
|
※5 |
BIM |
「Building Information Modeling」の略称であり、コンピュータ上に作成した3次元の建物のデジタルモデルに、管理情報などの属性データを追加した構築物のデータベースを、建物の設計、施工から維持管理までのあらゆる工程で情報活用を行うためのソリューションを指す |
|
※6 |
CAD |
「Computer Aided Design」の略称であり、コンピュータを用いて設計をすること、又はコンピュータによる設計支援ツールのことを指す |
|
※7 |
差分分析 |
量的調査などで用いられる統計的手法のことであり、施策の効果の因果関係を統計的に推理していく分析手法を指す |
|
※8 |
UI/UX |
「ユーザーインターフェースとユーザーエクスペリエンス」の略であり、それぞれ、ウェブサイトやアプリなどのデザインや操作性に関わる部分、そしてそのデザインや操作性がユーザーに与える全体的な印象や感情を指す |
|
※9 |
SfM技術 |
「Structure from Motion」の略称であり、3次元構造を2次元のカメラ画像や動画から推定する技術 |
|
※10 |
非GPS環境 |
屋内や、構造物の近く、橋梁下において、GPS、GNSSデータが遮断され位置情報を把握することが困難な環境 |
|
※11 |
フィードバック制御 |
実際の状況をリアルタイムに取得し、それに基づいて制御入力を決定する制御技術 |
|
※12 |
非線形ロバスト制御 |
制御理論、制御技術の一つであり、一般的にPID制御よりも高度な数学が用いられ、制御対象をより正確に制御することが可能な制御技術 |
|
※13 |
PID制御 |
比例(P)制御、積分(I)制御、微分(D)制御の組み合わせによって、設定された目標値にフィードバック(検出値)を一致させる制御機能を指す。速度、圧力、流量、温度などの制御に使用される技術 |
|
※14 |
オプティカルフローセンシング |
動画像において、各点の動きをベクトルとして求める技術を指す |
|
※15 |
UWB |
Ultra Wide Bandの略称であり、超広帯域を意味する無線通信技術のことであり、高精度な位置測位を可能とすることが特徴 |
|
※16 |
STARVISセンサ |
可視光線領域に留まらず、沢山の光を集めることができる夜間の撮影にも適した高感度な裏面照射型画素技術を指す |
|
※17 |
3次元点群 |
3次元レーザースキャナーなどで物体や地形を計測したデータ(スキャナーからの相対的なX,Y,Z情報やカメラの画像データから得た色の情報)をコンピュータ上で扱う際、物体や地形を「点」の集合体で表現したもの |
|
※18 |
ブラシレスモーター |
整流子やブラシなどの機械的な接触部を取り除いたモーターを指す |
|
※19 |
空力特性 |
ドローンが飛行中やプロペラで吹き下ろす空気の流れから受ける様々な影響(機体にかかる力やモーメント、そしてそれらの力やモーメントに起因する機体の安定性や操縦性等の飛行性能)のこと |
(事業系統図)
4【関係会社の状況】
関連会社は次のとおりであります。
|
名称 |
住所 |
資本金 (千円) |
主要な事業の内容 |
議決権の所有割合又は被所有割合 (%) |
関係内容 |
|
CalTa株式会社 (注)1,2 |
東京都港区 |
50,000 |
インフラDX事業 |
34.0 |
営業取引 役員の兼務 事務所賃借 社員の出向 等 |
(注)1.「主要な事業の内容」欄には、セグメントの名称を記載しております。
2.有価証券届出書又は有価証券報告書を提出している会社ではありません。
5【従業員の状況】
(1)提出会社の状況
|
|
|
|
|
2024年5月31日現在 |
|
従業員数(人) |
平均年齢(歳) |
平均勤続年数(年) |
平均年間給与(円) |
|
|
|
( |
|
|
|
当社はインフラDX事業の単一セグメントであるため、事業部門別に記載しております。
|
事業部門の名称 |
従業員数(人) |
|
|
スマート保安事業部 |
21 |
(6) |
|
技術開発部 |
16 |
(2) |
|
DX事業部 |
9 |
(3) |
|
管理部 |
6 |
(2) |
|
合計 |
|
( |
(注)1.従業員数は就業人員(当社から社外への出向者を除き、社外から当社への出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員を含む。)は、最近1年間の平均人員を( )外数で記載しております。
2.平均年間給与は、賞与及び基準外賃金を含んでおります。
(2)労働組合の状況
当社において労働組合は結成されておりませんが、労使関係は円満に推移しております。
(3)管理職に占める女性労働者の割合、男性労働者の育児休業取得率及び労働者の男女の賃金の差異
当社は、「女性の職業生活における活躍の推進に関する法律」(2015年法律第64号)及び「育児休業、介護休業等育児又は家族介護を行う労働者の福祉に関する法律」(1991年法律第76号)の規定による公表義務の対象ではないため、記載を省略しております。