第二部【企業情報】
第1【企業の概況】
1【主要な経営指標等の推移】
(1)連結経営指標等
|
回次 |
第11期 |
第12期 |
|
|
決算年月 |
2021年3月 |
2022年3月 |
|
|
売上高 |
(千円) |
|
|
|
経常損失(△) |
(千円) |
△ |
△ |
|
親会社株主に帰属する 当期純損失(△) |
(千円) |
△ |
△ |
|
包括利益 |
(千円) |
△ |
△ |
|
純資産額 |
(千円) |
|
|
|
総資産額 |
(千円) |
|
|
|
1株当たり純資産額 |
(円) |
△ |
|
|
1株当たり当期純損失(△) |
(円) |
△ |
△ |
|
潜在株式調整後 1株当たり当期純利益 |
(円) |
|
|
|
自己資本比率 |
(%) |
|
|
|
自己資本利益率 |
(%) |
|
|
|
株価収益率 |
(倍) |
|
|
|
営業活動による キャッシュ・フロー |
(千円) |
△ |
△ |
|
投資活動による キャッシュ・フロー |
(千円) |
△ |
△ |
|
財務活動による キャッシュ・フロー |
(千円) |
|
|
|
現金及び現金同等物 の期末残高 |
(千円) |
|
|
|
従業員数 |
(人) |
|
|
|
(外、平均臨時雇用者数) |
( |
( |
|
(注)1.売上高には、消費税等は含まれておりません。
2.潜在株式調整後1株当たり当期純利益については、潜在株式は存在するものの、当社株式は非上場であり、期中平均株価が把握できないため、また、1株当たり当期純損失であるため記載しておりません。
3.自己資本利益率については、親会社株主に帰属する当期純損失が計上されているため記載しておりません。
4.株価収益率については、当社株式は非上場であるため、記載しておりません。
5.11期以降は、多額の先行研究開発投資と長期の開発期間を要する宇宙関連機器の開発に従事していることにより、経常損失及び親会社株主に帰属する当期純損失を計上しております。また、同様の理由により、営業活動によるキャッシュ・フローがマイナスとなっております。
6.従業員数は就業人員(当社グループからグループ外への出向者を除き、グループ外から当社グループへの出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員、季節工を含む。)は、年間の平均人員を( )外数で記載しております。
7.第11期及び第12期の連結財務諸表については、「連結財務諸表の用語、様式及び作成方法に関する規則」(昭和51年大蔵省令第28号)に基づき作成しており、金融商品取引法第193条の2第1項の規定に基づき、有限責任 あずさ監査法人の監査を受けております。
8.2022年1月26日開催の取締役会決議により、2022年2月19日付で普通株式1株につき20株の株式分割を行いましたが、第11期の期首に当該株式分割が行われたと仮定し、1株当たり純資産額及び1株当たり当期純損失を算定しております。
(2)提出会社の経営指標等
|
回次 |
第7期 |
第8期 |
第9期 |
第10期 |
第11期 |
第12期 |
|
|
決算年月 |
2017年8月 |
2018年3月 |
2019年3月 |
2020年3月 |
2021年3月 |
2022年3月 |
|
|
売上高 |
(千円) |
|
|
|
|
|
|
|
経常損失(△) |
(千円) |
△ |
△ |
△ |
△ |
△ |
△ |
|
当期純損失(△) |
(千円) |
△ |
△ |
△ |
△ |
△ |
△ |
|
資本金 |
(千円) |
|
|
|
|
|
|
|
発行済株式総数 |
|
|
|
|
|
|
|
|
普通株式 |
(株) |
|
|
|
|
|
|
|
A1種優先株式 |
|
|
|
|
|
|
|
|
A2種優先株式 |
|
|
|
|
|
|
|
|
B種優先株式 |
|
|
|
|
|
|
|
|
純資産額 |
(千円) |
△ |
|
|
|
|
|
|
総資産額 |
(千円) |
|
|
|
|
|
|
|
1株当たり純資産額 |
(円) |
△ |
△ |
△ |
△ |
△ |
|
|
1株当たり配当額 |
(円) |
|
|
|
|
|
|
|
(うち1株当たり中間配当額) |
( |
( |
( |
( |
( |
( |
|
|
1株当たり当期純損失(△) |
(円) |
△ |
△ |
△ |
△ |
△ |
△ |
|
潜在株式調整後1株当たり当期純利益 |
(円) |
|
|
|
|
|
|
|
自己資本比率 |
(%) |
△ |
|
|
|
|
|
|
自己資本利益率 |
(%) |
|
|
|
|
|
|
|
株価収益率 |
(倍) |
|
|
|
|
|
|
|
配当性向 |
(%) |
|
|
|
|
|
|
|
従業員数 |
(人) |
|
|
|
|
|
|
|
(外、平均臨時雇用者数) |
( |
( |
( |
( |
( |
( |
|
(注)1.売上高には、消費税等は含まれておりません。
2.1株当たり配当額及び配当性向については、配当を実施していないため、記載しておりません。
3.潜在株式調整後1株当たり当期純利益については、第7期、第8期、第9期、第10期、第11期及び第12期については、潜在株式は存在するものの、当社株式は非上場であり、期中平均株式が把握できないため、また、いずれの期においても1株当たり当期純損失であるため記載しておりません。
4.自己資本利益率については、当期純損失を計上しているため記載しておりません。
5.株価収益率については、当社株式は非上場であるため、記載しておりません。
6.第7期以降は、多額の先行研究開発投資と長期の開発期間を要する宇宙関連機器の開発に従事していることにより、経常損失及び当期純損失を計上しております。
7.従業員数は就業人員(当社から社外への出向者を除き、社外から当社への出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員、季節工を含む。)は、年間の平均人員を( )外数で記載しております。
8.第8期は、決算期変更により2017年9月1日から2018年3月31日までの7ヵ月間となっております。
9.第11期及び第12期の財務諸表については、「財務諸表等の用語、様式及び作成方法に関する規則」(昭和38年大蔵省令第59号)に基づき作成しており、金融商品取引法第193条の2第1項の規定に基づき、有限責任 あずさ監査法人の監査を受けております。
なお、第7期、第8期、第9期及び第10期の財務諸表については、「会社計算規則」(2006年法務省令第13号)の規定に基づき算出した各数値を記載しております。また、当該各数値については、金融商品取引法第193条の2第1項の規定に基づく有限責任 あずさ監査法人の監査を受けておりません。
10.2022年2月16日付でA1種優先株式904,556株、A2種優先株式344,573株、B種優先株式205,564株、C種優先株式231,249株を自己株式として取得し、その対価として普通株式をそれぞれ904,556株、344,573株、205,564株、231,249株交付しております。また、2022年1月26日開催の取締役会決議により、2022年2月16日付で自己株式として保有するA1種優先株式、A2種優先株式、B種優先株式及びC種優先株式をすべて消却しております。なお、当社は2022年2月18日開催の臨時株主総会において、同日付で種類株式を発行する旨の定款の定めを廃止しております。
11.2016年11月29日付で普通株式1株につき1,000株に株式分割を行っておりますが、第7期の期首に当該株式分割が行われたと仮定し、1株当たり純資産額及び1株当たり当期純損失を算定しております。また、2022年1月26日開催の取締役会決議により、2022年2月19日付で普通株式1株につき20株の株式分割を行いましたが、第11期の期首に当該株式分割が行われたと仮定し、1株当たり純資産額及び1株当たり当期純損失を算定しております。
12.当社は、2016年11月29日付で普通株式1株につき1,000株の株式分割を行っております。また、2022年1月26日開催の取締役会決議により、2022年2月19日付で普通株式1株につき20株の株式分割を行っております。そこで、東京証券取引所自主規制法人(現 日本取引所自主規制法人)の引受担当者宛通知「『新規上場申請のための有価証券報告書(Ⅰの部)』の作成上の留意点について」(平成24年8月21日付東証上審第133号)に基づき、第7期の期首に当該株式分割が行われたと仮定して算出した場合の1株当たり指標の推移を記載しております。
なお、第7期、第8期、第9期及び第10期の数値(1株当たり配当額についてはすべての数値)については、有限責任 あずさ監査法人の監査を受けておりません。
|
回次 |
第7期 |
第8期 |
第9期 |
第10期 |
第11期 |
第12期 |
|
|
決算年月 |
2017年8月 |
2018年3月 |
2019年3月 |
2020年3月 |
2021年3月 |
2022年3月 |
|
|
1株当たり純資産額 |
(円) |
△27.06 |
△27.86 |
△56.56 |
△92.46 |
△137.27 |
160.46 |
|
1株当たり当期純損失(△) |
(円) |
△20.06 |
△21.23 |
△28.70 |
△35.90 |
△55.43 |
△80.56 |
|
潜在株式調整後1株当たり当期純利益 |
(円) |
- |
- |
- |
- |
- |
- |
|
1株当たり配当額 |
(円) |
- |
- |
- |
- |
- |
- |
|
(うち1株当たり中間配当額) |
(-) |
(-) |
(-) |
(-) |
(-) |
(-) |
|
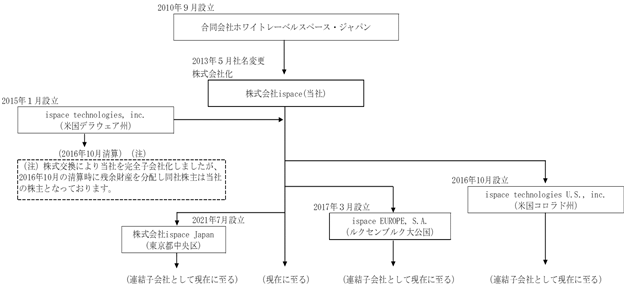
2【沿革】
当社グループの創業者である袴田武史は、米大学院で航空宇宙工学修士号を取得後、経営コンサルティング会社を経て、民間による月面探査車(以下、「ローバー」という。)開発及び、世界初の民間月面探査レース「Google Lunar XPRIZE」への参加を目指し、2010年9月に合同会社ホワイトレーベルスペース・ジャパン(現当社)を設立いたしました。その後、ローバー開発及び資金調達面で提携していた欧州のホワイトレーベルスペース財団が「Google Lunar XPRIZE」から脱退したことを受け、2013年5月に組織変更を行い、現在の株式会社ispaceに社名を変更した後、2013年7月に「Google Lunar XPRIZE」に日本唯一のチーム「HAKUTO」として独自に参加いたしました。
当社グループは、将来の米国進出に向けて2015年1月に米国デラウェア州にispace technologies, inc.を設立し、当社を子会社化する組織変更を実施しましたが、2016年10月には、日本での事業化加速を優先するために親会社であるispace technologies, inc.を解散の上、当社を親会社とした上で改めて子会社ispace technologies U.S., inc.を米国デラウェア州に設立し、NASA Ames Research Park(米国カリフォルニア州)内にオフィスを設置しました。なお、2020年12月には米国子会社において月着陸船(以下、「ランダー」という。)の開発を実施するための体制を構築するため、子会社ispace technologies U.S., inc.のオフィスをコロラド州デンバーに移転しております。また2017年3月には、ルクセンブルク大公国政府との間で月の資源開発に関する覚書を締結し、子会社ispace EUROPE S.A.をルクセンブルク市に設立しております。直近では、当社事業運営上必要となる電波法に係る無線免許の取得及び電波利用を実施するための子会社として、株式会社ispace Japanを2021年7月に設立し、現在に至っております。
資金調達面では、当社グループは自社によるランダー及びローバーの開発と事業化を目指し、2017年12月から2018年2月にかけてシリーズAとして国内過去最高額、また、宇宙分野のシリーズAとしては世界過去最高額(いずれも2018年2月当時)となる103.5億円の新株発行による資金調達を行いました。更に2020年7月から12月にかけてシリーズBとして35億円の新株発行による資金調達、2021年7月から10月にかけてシリーズCとして55.6億円の新株発行による資金調達を実施しております。また、2021年5月には国内大手銀行4行と融資契約を締結し総額19.5億円の借入を実行、2022年7月には株式会社三井住友銀行をアレンジャー、株式会社みずほ銀行、株式会社三菱UFJ銀行、株式会社商工組合中央金庫をコアレンジャー、株式会社静岡銀行を参加金融機関とする、総額50億円のシンジケートローン契約を締結の上、本件融資を実行しております。当資金を原資としたランダー及びローバーの開発を進めると同時に、事業化のための市場と顧客の開拓を行っております。
|
年月 |
事項 |
|
2010年1月 |
当社代表取締役CEOの袴田武史が東北大学吉田和哉教授とともに日本からGoogle Lunar XPRIZE(注1)参加の検討を開始 |
|
2010年9月 |
合同会社ホワイトレーベルスペース・ジャパン(現 当社)を埼玉県入間市に設立 |
|
2011年8月 |
Google Lunar XPRIZE向けの月面探査車(ローバー)のプロトタイプを発表 |
|
2013年5月 |
合同会社を株式会社に組織変更し、社名を株式会社ispaceに変更 |
|
2013年7月 |
Google Lunar XPRIZEに日本唯一の参加チーム「HAKUTO」(注2)として始動 |
|
2015年1月 |
「HAKUTO」で開発するローバーが宇宙空間でも機能する性能を持つことが評価され、Google Lunar XPRIZEの中間賞を受賞 |
|
2015年1月 |
米国デラウェア州にispace technologies, inc.を設立し、株式会社ispaceを子会社化する組織変更を実施 |
|
2015年8月 |
業容拡大に伴い、本社を東京都港区麻布台に移転 |
|
2016年4月 |
月面開発事業への本格進出に向け、月着陸船(ランダー)の開発に着手 |
|
2016年10月 |
インキュベイトファンド株式会社及び株式会社日ノ樹よりコンバーティブル・エクイティで2億円を調達 |
|
2016年10月 |
日本での事業化加速のため、米国本社ispace technologies, inc.を解散の上、株式会社ispaceを本社に変更 |
|
2016年10月 |
新規に子会社ispace technologies U.S., inc.(連結子会社)を米国デラウェア州に設立し、NASA Ames Research Park(米国カリフォルニア州)内にオフィスを設置 |
|
2017年3月 |
ルクセンブルク大公国政府と月の資源開発に関する覚書を締結し、子会社ispace EUROPE S.A.(連結子会社)を設立 |
|
2017年12月 |
月着陸船(ランダー)開発のために101.5億円の資金調達(シリーズA)を実施 |
|
2018年2月 |
シリーズAの追加ラウンドとして2億円(累計103.5億円)の資金調達を実施 |
|
2018年3月 |
Google Lunar XPRIZEの終了に伴い、HAKUTOプログラムを終了 |
|
2018年7月 |
業容拡大に伴い、本社を東京都港区芝に移転 |
|
2018年9月 |
月面探査の技術検証ミッション「HAKUTO-R」(注3)プログラムの立上げ及びSpace Exploration Technologies Corp.(以下、「SpaceX社」という。)のファルコン9ロケットで相乗りでの打上げを公表 |
|
2018年11月 |
NASAによる月面輸送サービスの商業的購買プログラムであるCommercial Lunar Payload Serviceに米国The Charles Stark Draper Laboratory, Inc.のチームとして選定(注4) |
|
2019年5月 |
European Space Agency(以下、「ESA」という。)との間で、月資源利用の実証に向けたミッション「In-Situ Resource Utilization」(ISRU)の事前検討に係る契約を締結(注5) |
|
2019年7月 |
子会社のメンバーが、ESAの月の水探査を目指すプロジェクト(PROSPECT)のサイエンスチームに選出 |
|
2020年7月 |
月着陸船(ランダ―)開発のために追加で30億円の資金調達(シリーズB)を実施 |
|
2020年12月 |
ispace technologies U.S., inc.のオフィスをカリフォルニア州からコロラド州デンバーへ移転 |
|
2020年12月 |
ミッション・コントロール・センター(月着陸船及び月面探査車を地球から操縦するための管制室)を東京都中央区日本橋に開設 |
|
2020年12月 |
NASAによる月面で採取した月のレゴリス(砂)の販売に関する商取引プログラムに、当社とispace EUROPE S.A.が採択される |
|
2020年12月 |
シリーズBの追加ラウンドとして5億円(累計35億円)の資金調達を実施 |
|
2021年2月 |
業容拡大に伴い、本社を東京都中央区日本橋浜町に移転 |
|
2021年5月 |
国内大手銀行4行から、総額19.5億円の借入を実行 |
|
2021年7月 |
東京都中央区に株式会社ispace Japanを設立 |
|
2021年7~8月 |
月着陸船開発のために追加で53.1億円の資金調達(シリーズC)を実施 |
|
2021年10月 |
シリーズCの追加ラウンドとして2.5億円(累計55.6億円)の資金調達を実施 |
|
2021年12月 |
子会社ispace EUROPE S.A.がESAの月面輸送サービスパイロットプログラムにAriane groupと共同採択される |
|
2022年7月 |
ispace technologies U.S., inc.がチャールズ・スターク・ドレイパー研究所(以下、「ドレイパー研究所」という。)を中心とするチームの一員としてNASAの商業的物資輸送プログラム(Commercial Lunar Payload Services、以下、「CLPS」という。)のタスクオーダーCP-12のサービスプロバイダーに採択される |
|
2022年7月 |
金融機関各行より総額50億円の借入を実行 |
|
2022年12月 |
民間月面探査プログラムミッション1の打上げをフロリダ州ケープカナベラル宇宙基地より実施 |
(注)1.Googleがスポンサーとなり、Xプライズ財団によって開催、運営された世界初の民間月面探査レースであります。
2.当社運営のGoogle Lunar XPRIZEに向けた月面探査チームであり、名称は日本古来の「月にはウサギがいる」という伝承に因んだ「白兎」に由来しております。
3.「HAKUTO-R」プログラムは、米国Google社がスポンサーとなりXプライズ財団によって開催、運営された世界初の民間月面探査レース「Google Lunar XPRIZE」に、当社が日本から唯一参加して挑んだ際のチーム名称「HAKUTO」に由来しております。当該レースは最終的に参加全チームが期日内の打上げを達成できず、勝者のないまま期限切れにより終了しておりますが、チーム「HAKUTO」は、最終選考の5チームに選ばれ、2015年1月には開発するローバーが宇宙空間でも機能する性能を持つとして高い評価を受け、モビリティ部門における中間賞(賞金50万米ドル)を受賞いたしました。レース終了後、HAKUTOを応援していただいた多くの皆様の想いを継承しつつ、初心に立ち返って、日本初の民間月面探査実現への挑戦を”R”eboot(再起動)するという想いを込め、当社ミッション1及びミッション2からなる技術実証ミッションを「HAKUTO-R」と呼称しております。なお、ロゴは、HAKUTOでモチーフとした白いうさぎと頭文字の「H」を継承しながら、さらに一筆書きできる曲線によって地球から月へ向かうランダーの軌道と月面を表現しております。
3【事業の内容】
当社は「Expand our planet. Expand our future.」をビジョンに掲げ、人類の生活圏を宇宙に広げ持続的な世界を実現するべく、月面開発の事業化に取り組んでいる次世代の民間宇宙企業です。当社グループは、当社及び連結子会社であるispace EUROPE S.A.(ルクセンブルク大公国)、ispace technologies U.S., inc.(米国)、株式会社ispace Japan(日本)の計4社で構成されております。
<ビジネスモデルについて>
当社グループは、現在自社にて開発中のランダー及びローバーを用いて、1.ペイロードサービス、2.データサービス及び3.パートナーシップサービスを提供することを、ビジネスモデルとしております。
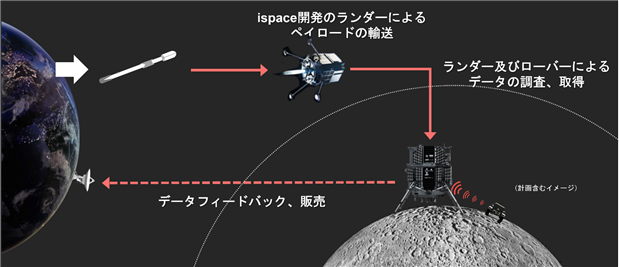
1.ペイロードサービス
月に輸送する物資である顧客の荷物(以下、「ペイロード」という。)を当社グループのランダーやローバーに搭載し、月まで輸送するサービスを提供します。本サービスには、ロケットの打上げから月面へのペイロードの輸送は勿論のこと、打上げの約1~2年前頃を目途に開始される、顧客のペイロードをランダー及びローバーに搭載するための技術的なアドバイスと調整、更には月面到着後の実験や、これらに関連するデータ通信等に係るサービスの提供まで含まれます。当社グループでは、基本的に1機のランダーによる1回の月着陸及び月面探査のプロジェクトを「1ミッション」と定義し、ミッション単位で事業を運営しております。当社グループでは、初の月面着陸ミッションとなる2022年のミッション1及び、続く月面探査ミッションとなる2024年(予定)のミッション2を、技術実証ミッションとして位置付け、これら2ミッションを総括して「HAKUTO-R」プログラムと呼称しております。
当社のランダーはSpaceX社のファルコン9ロケットにより打ち上げられ、成層圏を超えた宇宙の比較的地球に近いポイントまで運搬された後、ロケットから放出され、ランダー自身で燃料噴射による軌道制御等を繰り返した後、月遷移軌道と呼ばれる軌道へ入り、約4ヵ月の期間をかけて月の周回軌道へと入った後に月面着陸をします。着陸後はローバー(当社自身の開発ローバーはミッション2以降で輸送する計画)等の一部の稼働ペイロードはランダーから放出され、また一部のペイロードはランダー内部に搭載されたまま、月面での観測活動等を行い、データ収集等を行います。
取得したデータは当社のランダーを経由して地球に伝送される計画であり、月面におけるミッション期間は現在のところ、太陽光エネルギーをランダー及びローバーが獲得可能な、月の日中時間(約14日間)をミッション1では計画しています。なお、ロケットから放出された後、ミッション完了まで当社が中央区日本橋に開設いたしましたミッション・コントロール・センターにおいて、人工衛星のミッション・オペレーションの知見を有する当社の従業員(ミッション・オペレーション・グループ)により制御されます。また、制御するために必要なミッション・コントロール・センターとランダー間の宇宙通信については、ESA傘下のEuropean Space Operation Centre(以下、「ESOC」という。)の協力の下、同機関が保有する専用の宇宙通信ネットワークを利用するため、同機関と当社のミッション・コントロール・センターを回線で繋いだ通信試験を事前に実施しております。
図1:提供サービスのイメージ図
本サービスは、ペイロード重量に応じて1kg当たりの価格を顧客に課金する料金体系(注1)であり、ロケット打上げの1~2年前の本契約時からロケット打上げまでの間に、その全額が一括若しくは複数回に分割されて入金されます。宇宙開発分野においては、ミッションのための開発コストを負担する場合等、支出がミッションの1~2年前から発生することが多いことから、この様な打上げの1~2年前から入金が発生する契約体系は、当該分野において比較的一般的な商慣行となっており、ミッション1及びミッション2の契約締結済み顧客だけでなく、今後契約締結を進めていくミッション3以降の顧客との間でも同様の契約体系を基本とする予定です。また、売上の計上方法につきましては、ロケット打上げの1~2年前からペイロードの仕様や当社ランダーとのインターフェースの調整等のエンジニアリング検討の提供が開始されることから、本契約以降、ランダーが月へ到着しミッションを完了させるまでの期間にわたって、履行義務充足に応じた売上計上がなされる想定となります(注2)。
ミッション1では自社で開発したランダーを月面に着陸させ、顧客ペイロードの月面への輸送や、顧客の要望に応じた月面データの取得等のサービスを実現いたします。ミッション2では更に自社で開発したローバーを月面で走行させ、月の多様な情報を取得するための月面探査を行います。当社グループが開発するランダー及びローバーの外観は図2のとおりで、基本的に有人を想定しない、ロボティックス(無人)ミッションを想定しております。
ミッション1及びミッション2で使用するシリーズⅠランダーは、最大30kgのペイロードを運搬可能な設計となります。一方、2025年(予定)のミッション3以降で使用するシリーズⅡランダーは、この設計を拡張させ、最大500kgのペイロードを運搬可能な設計へ変更する予定であり、既に開発に着手しております。また、現在ミッション6以降での利用を目指し、シリーズⅢランダーの設計コンセプトの検討を開始しております。シリーズⅢランダーは、シリーズⅡランダーと同様に最大500kgのペイロードを運搬可能な設計を想定しており、日本において開発し、米国のみならず世界中のサプライヤーからの柔軟な調達を可能とすることによる開発コストの低減を目指し、今後開発を進捗させてまいります。
ミッション4以降は、原則として年間2回、さらに中長期的には年間3回のミッションを通じて、高頻度にランダーでの月面着陸とローバーでの月面探査を実施することで、顧客荷物の月輸送や、顧客の要望に応じた月面データの取得等のサービスを行う、安定的な商業プラットフォームを構築することを目指しております。特に2020年代の後半にかけては、ペイロードサービスによりもたらされる安定的な収益を基盤としながら、高頻度ミッションにより取得したデータを解析・高付加価値化したデータプラットフォームを構築し、顧客が必要とする情報にアクセス可能なサブスクリプションモデルのビジネスを展開することで当社事業の更なる成長を目指してまいります。また、データプラットフォーム構築のための先端開発投資として、データ取得のためのセンサー開発、データ解析、水資源探査、輸送サービス向上等を順次実施していく予定です。
現在、当社初の実証ミッションとなる2022年のミッション1では、全体で約12.43kgのペイロードを輸送しますが、その内の10kgについてはアラブ首長国連邦(UAE)のドバイの政府宇宙機関であるMohammed Bin Rashid Space Centre(以下、「MBRSC」という。)との間で月面探査ローバーの輸送を、日本特殊陶業株式会社との間では固体電池の輸送に関するペイロードサービス契約を締結しております。また、カナダ宇宙庁が推進する月面技術開発、宇宙空間での実証、科学ミッションを支援する月面探査加速プログラムであるLunar Exploration Accelerator Program(以下、「LEAP」という。)に採択されたカナダの民間企業であるMission Control Space Services(以下、「MCSS」という。)との間で人工知能のフライトコンピューター、同じくカナダの民間企業であるCanadensys Aerospace Corporation(以下、「Canadensys」という。)との間でカメラのペイロードサービス契約を締結しております。その他、宇宙航空研究開発機構(以下、「JAXA」という。)との間で変形型月面ロボットのペイロード輸送を合意し、2021年4月に本契約を締結しております。また、2024年(予定)のミッション2では全体で10.5kgのペイロード輸送を計画しており、高砂熱学工業株式会社の月面用水電解装置、台湾中央大学の深宇宙放射線プローブ及び株式会社ユーグレナの微細藻類培養装置を輸送するペイロードサービス契約を締結しております。さらには、2025年(予定)のミッション3ではアメリカ航空宇宙局(the National Aeronautics and Space Administration(以下、「NASA」という。))のペイロード約95kgを輸送する予定であるほか、法的拘束力のあるペイロードサービス契約は未締結であるものの、Helios Project, Ltd.との間で最大5kgのレゴリス融解酸素生成装置を、また、株式会社アークエッジ・スペースとの間で15kgの小型衛星、Aviv Labs, LLC,との間で小型温室実験装置、CesiumAstro, Inc.,との間で通信機器、AstronetX PBC,との間で月面カメラのペイロードを輸送することを想定したペイロードサービス中間契約を締結しています。
(注1) 2022年12月時点の当社の価格設定としては、ランダーに搭載するペイロード価格として月面まで輸送する場合は1.5百万米ドル/kg、月周回軌道上まで輸送する場合は0.5百万米ドル/kg、ローバーに搭載するペイロード価格として、3.5百万米ドル/kgを基本価格として設定しています。なお、当社が行うペイロードサービスの単価については既に確立した水準は存在しないことから、契約相手方との関係や競合相手の状況によっては、当社が希望する水準での価格設定を行えない可能性があります。一方で、ペイロードの技術要件等の諸条件によっては、上記以上の価格での契約締結となる場合もあります。
(注2) 具体的な計上方法としては、ミッション1からミッション3については、原則として原価回収基準を適用する見込みです。ミッション4以降の会計方針については会計監査人との協議を適宜実施しながら検討中となりますが、契約時からミッション完了時までの期間にわたり、原価の発生割合により履行義務の進捗度を見積る方法により売上計上することを想定しております。
図2:当社が開発する月着陸船(ランダー:左)と月面探査車(ローバー:右)(それぞれの縮尺は異なります)
|
|
|


2.データサービス
本書提出日現在において売上計上の開始には至っておりませんが、当社は将来的にデータサービスを主要サービスの1つとして提供する予定となります。顧客自身がペイロードを準備の上、当社に輸送を委託し、月面や月周回軌道から地球へ試験データをフィードバックする当社のペイロードサービスを活用した直接的なデータ収集に加えて、顧客が当社のペイロードを利用してデータ収集を行い、地球へその結果をデータとして送り返し、解析の上、次なるR&Dへ活用したいというニーズが確認されています。 当社ではこれをデータサービスとして定義しており、ミッション1では、LEAPに採択されたカナダの民間企業であるNGC Aerospace Ltd(以下、「NGC」という。)との間で、当社が開発するカメラを利用して月面画像データを取得するという契約を締結しております。
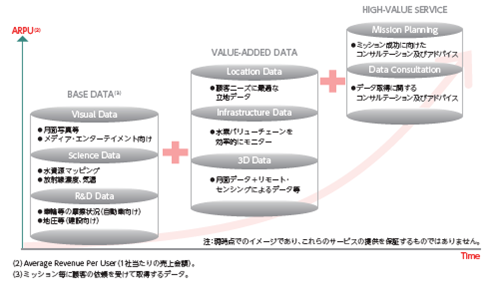
① 足許で需要が顕在化すると見込まれる、ミッションを通じたデータ取得サービス
当面の間(足許から2025年頃まで)は、ミッションごとに、当社自らが開発・購入するデータ計測機器やカメラ機器等(インターナル・ペイロード)を輸送し、主に月のデータを取得し、時には顧客の特定のニーズに合わせて取得するデータも都度アレンジしつつ、取得したデータを顧客に対して提供する予定です。またデータ提供だけではなく、(1)データ取得前の取得に関する技術コンサルテーションや運用計画、(2)取得後にデータを地球にフィードバックするための運用(電力・通信の運用)等もサービスの一環として提供することを目指しており、当社が現時点で想定している主なデータは以下のとおりです。
マーケティングデータ: 宇宙空間・月面風景・月から見た地球に関する画像・映像等
サイエンスデータ:資源分布、土壌、気温、放射線等の環境情報等
R&Dデータ:特定顧客・特定産業の将来のR&Dに必要なデータ(例:建築業界や自動車業界の研究開発の検討に資する地形・地質・堆砂圧データ等)
② 将来的に顕在化することが見込まれる大規模データベースの利用サービス
将来的(2026年以降を想定)には、当社の高頻度なミッションを通じて、当社のインターナル・ペイロードから取得・蓄積した情報に、地球上で入手可能な既存のデータも加え、加工、解析、統合することで、顧客にとって高付加価値な「大規模な月のデータベース」をクラウド上に構築し、顧客が自由にアクセスし、定額料金を課金の上、利用して頂く、SaaS(Software as a Service - サービスとしてのソフトウェア)型・サブスクリプションモデルのビジネスの展開を目指しています。地球上で、月面活動や試験等を簡易的にシミュレーションすることが可能となれば、より多くの企業が、より少ない負担で、月面事業への参画を検討することが可能となります。また、顧客はデータにアクセスするだけで、デジタル上でビジネスにおける潜在的なニーズを把握することが可能となり、これにより能動的な新事業開発の促進が期待され、将来の月面社会の創出へ大きく寄与することが想定されます。
入金と売上の計上方法につきましては、前者はペイロードサービス同様、ロケット打上げの1~2年前の本契約時から打上げまでの間に、その全額が一括若しくは複数回に分割されて入金され、本契約以降月へ到着しミッションを完了させるまでの期間にわたり、履行義務の進捗度に応じて売上が計上される想定であり、後者は、サブスクリプションモデルによる月額課金及び月次での売上計上を想定しております。
図3:データビジネスの成長イメージ
3.パートナーシップサービス
当社グループは、当社グループの活動を、コンテンツとして利用する権利や広告媒体上でのロゴマークの露出、データ利用権等をパッケージとして販売し、技術開発や事業開発で協業を行うパートナーシップ・プログラムの提供を行っております。過去にはGoogle Lunar XPRIZEに伴う当社の活動に関するパートナーシップ・プログラムを実施し、累計約10億円の売上を計上いたしました。
続く、史上初の民間による月面探査プログラムとなる「HAKUTO-R」においても、ミッション1及びミッション2の活動期間を対象とするパートナーシップサービスを提供しており、現在、複数の民間企業とパートナーシップ関係を構築しております。入金については、契約時からプログラム終了期間までの間に、総額一括若しくは複数回に分割して行われます。また売上の計上方法につきましては、パートナー各社から受領した協賛金総額を、契約時以降プログラム終了までの期間で分割して月々計上しております。
本パートナーシップサービスを通じた対象企業との関係構築は、一過性の広告活動やブランディング活動に留まらず、当社グループのペイロードサービス及びデータサービスに係る将来の潜在的な顧客ニーズを創出し、当社の中長期的なビジョンである「Moon Valley 2040」の実現に向けて、月面での経済圏の創出に多様な産業から民間企業の参入を実現する上での重要な布石と位置付けております。ペイロードサービス及びデータサービスからの収入に対して、パートナーシップサービスからの収益の割合は今後相対的に減少するものの、ミッション3以降も新たなプログラムを策定の上、継続して計上する予定です。なお、本パートナーシップサービスの展開に当たっては、当社は株式会社電通と業務提携契約を締結の上、販売窓口として当サービスを推進頂いております。
図4:HAKUTO-Rコーポレートパートナー(本書提出日現在)

<当社グループが注力する月面輸送サービスのセグメントについて>
現在の月面物資輸送市場は、主にランダーで運搬されるペイロードのサイズに応じて、小型セグメント(500kg以下のペイロード)、中型セグメント(500kg超~1,000kg未満のペイロード)、大型セグメント(1,000kg以上のペイロード)の三分類に分かれると考えております。ペイロードの大きさが拡大するに伴ってランダーのサイズも大型化され、一般的に大型セグメントのランダーは有人向けのものが中心となります。
当社グループは、ランダーとローバーの小型軽量化による開発費の低コスト化の優位性を活かし、年複数回の高頻度なミッションを実現することを見据え、小型セグメントへの戦略的集中を行っております。当小型セグメントには、独自の顧客市場の存在、及び技術的観点の差異から、その他の中型から大型セグメントとの間に明確な区分けが存在し、それぞれのセグメントで活動するプレーヤーも区別されていると考えられます。
顧客の観点では、特に足許の市場草創期においては、民間企業や研究機関等からの比較的小型のペイロードを月面に輸送したいというニーズが存在しています。例えば、ペイロードを月面に輸送するに当たっては、顧客のペイロードをランダー及びローバーに搭載するための技術的なアドバイスと調整等の事前のアレンジメントが多数発生いたしますが、同様の顧客が複数、1機のランダーに相乗りをするケースが通常です。小型のペイロードの顧客の観点からは、大型ランダーの中で多数のペイロードの1つとして格納されるケースに比べ、小型ランダーの中で主要なペイロードの1つとして格納されるケースの方が、より自身のニーズに沿ってカスタマイズされたミッション設計(着陸地点・ミッション期間・ペイロードの環境条件等)を得られるメリットを享受できると考えております。また大型のペイロードによるミッションと比べて、より低コストかつ高頻度なミッションを実現できるため、上記のミッション設計の選択肢が多いというメリットもあります。
また、技術的観点からは、一般的に、無人が主流の小型ランダーと有人が主流の大型ランダーとでは、開発に求められる安全性要件の高さも異なれば、サイズ・重量等も異なるため、基本的にそれぞれの開発要素が全く異なるものと考えられます。特に当社グループの場合は民生品(Commercially available Off-The-Shelf、(以下、「COTS品」という。))を活用して低コスト化も実施する開発コンセプトでのエンジニアリングを追求しておりますが、これは大手プレーヤーによる大型ランダーの開発原則とは必ずしも一致しないと考えられます。従って、大型ランダーを製造するプレーヤーが小型ランダーに参入する場合には、低コスト・軽量化を実現するための技術的障壁が一定程度存在すると考えられます。
なお、当社は将来的にランダーのサイズアップを予定しており、輸送可能なペイロード容量を、ミッション1及びミッション2で予定する最大30kgから、ミッション3以降最大500kg程度まで増大させる開発に現在着手しておりますが、小型セグメントへの戦略的集中に変わりはありません。
<当社グループの開発及びミッション推進体制について>
当社グループは現在、技術実証ミッションとして月面探査プログラム「HAKUTO-R」であるミッション1及びミッション2を成功させるべく、ランダー及びローバーを開発し、ミッション1の打上げを2022年12月11日に実施いたしました。ミッション1のランダーは打上げ後、当社ミッション・コントロール・センターからの運用を実施しており、2023年4月下旬頃の月面着陸を目指して現在月への航行中となります。ランダーとは天体の表面に着陸し、静止することができる宇宙機であり、ローバーとは地球外の天体の表面を移動し、観測するために使われる車両であります。なお、当社のランダー及びローバーにつきましては有人利用を想定せず、無人のロボティックスとして開発しております。
ペイロード及びローバーは、ランダーの内部に格納され、更にそのランダーは打上ロケットの内部に格納され、打上ロケットによって宇宙空間における一定ポイントまで輸送されます。ランダーはロケットから分離された後、一定期間をかけて月に向けて自力で宇宙空間を推進し、月の周回軌道へと入り、月面に着陸をします。着陸後、ローバーはランダーから分離され、月面を自走しながら探査活動を行います。
ランダー及びローバーの開発、ランダー又はローバーへのペイロードの搭載、打上ロケットから切り離された後の月までの航行と着陸、月面の探査活動はすべて当社グループが行う活動です(ランダー及びローバーはすべて、当社グループのミッション・コントロール・センターから、当社グループオペレーターにより遠隔操作されます)。一方で当社グループは、打上ロケットに関しては自身で開発等は行わず、既に市場でサービス提供を行っている打上プロバイダーと契約の上、打上サービスを購買しております。
当社グループは2016年以降、ランダーの本格的な自社開発に着手するとともに、経験豊富なエンジニアを順次採用しており、足許では約140名のランダー開発エンジニア及びオペレーション専門のエンジニアが在籍し、開発プロジェクトのリーダー層には、衛星開発等で豊富な知見と経験を有する人材を確保しております。約半数が外国籍のエンジニアであることに加え、宇宙/非宇宙のバックグラウンドを持つエンジニア、ハードウェア/ソフトウェアの専門家等、幅広いエンジニアリング人材で構成されていることが1つの特徴です。これまでの宇宙開発ノウハウを最大限活用する一方で、自動車・機械産業等で培われた民間企業ならではの柔軟・迅速な開発プロセスを目指しています。
また、ソフトウェア技術の活用も民間企業として宇宙開発へ参入する上での重要な鍵となります。高い信頼性が求められる宇宙開発においては、これまで確実な信頼性評価が可能なハードウェア技術による開発が優先されてきました。一例としては、ロケットの推進力を向上させるためにはより大型のエンジンを多額のコストを投じて開発していくという考え方が挙げられます。一方、近年のソフトウェアによる制御技術の著しい進化により、民間企業でのソフトウェアを駆使した高度な開発が可能となり、上記のケースであれば、小型のエンジン複数機をソフトウェアで制御することにより、同程度の推進力を維持しつつも大幅なコスト削減が可能となります。このように、今後宇宙開発分野においてソフトウェア技術との融合によりハードウェアの小型軽量化を進めることで、大きなコスト削減が可能になると考えており、当社においても多くのソフトウェアエンジニアを採用し開発に従事しております。
なお、当社グループでは、信頼性を維持しながらコストと開発期間を短縮するべく、システム・インテグレータとしての開発スタンスを基本としております。すなわち、当社ではシステム要件を整理の上でシステム設計をしますが、部品については既に宇宙で実績のあるCOTS品を中心に調達をしており、内製化する部品を最小限としています。その上で、調達した部材を組立て、システム・インテグレートし、システム環境試験を行い、完成したことを検証することとしています。
<ランダー・ローバーのテクノロジー及びペイロード>
1.ローバーについて
当社は2010年の創業以来、一貫してローバー開発に取り組んでおり、その技術は当社の取締役兼テクノロジー・アドバイザーであった吉田和哉氏が教授を務める東北大学大学院工学研究科において研究開発されたロボティクス・ローバー技術がベースとなっております。当社は米国のGoogle社がスポンサーとなりXPRIZE財団が運営する世界初の月面探査レース「Google Lunar XPRIZE」に参戦しておりましたが、そこで使用するローバーのプロトタイプを2011年8月に発表し、2015年1月にはローバーのエンジニアリングモデル(注1)が宇宙空間でも機能する性能を持つことが評価され、Google Lunar XPRIZEの中間賞を受賞し50万米ドルの賞金を獲得しました。その後もフライトモデル(注2)の製造まで当社は完了させ、相乗り先である他社のランダーの打上げを待つ状態に有りましたが、月面探査レースは残念ながら2018年3月に勝者がいないまま終了となりました。当社のローバーは月面での実証を行うことができなかったものの、フライトモデルの製造まで完了させたことが一定の評価を受け、本ローバーは2019年に米ワシントンD.C.のスミソニアン航空宇宙博物館へ寄贈されました。
当社がGoogle Lunar XPRIZEを通じて開発したローバーは、総重量約4.0kgであり、当社が認識する限り、世界でも最小・最軽量の四輪ローバーです。月面の不整地を走破できる4輪駆動、360度の視野を持つカメラで静止画と動画の撮影等、宇宙空間で月面探査ミッションを達成できる能力を維持しつつ、可能な限りCOTS品を活用し、小型軽量化とコスト削減を実現しました。
(注1)基本設計に基づき製作し、機能・性能・環境試験に供することで設計の妥当性を確認し、次の詳細設計段階に移行するための設計を固めるためのデータを取得するためのモデル
(注2)実際に宇宙に打ち上げる本番モデル
2.ランダーについて
当社は2016年よりランダーの自社開発を開始し、2017年以降実施している複数回の資金調達を原資として開発作業を進捗させております。ミッション1及びミッション2で利用するシリーズⅠランダーのサイズは、乾燥重量:約340kg(燃料含まず)、ミッション3以降で利用予定のシリーズⅡランダーのサイズは乾燥重量:約1,350kg(燃料含まず)となっております。
ランダー開発と月面着陸の歴史は、1959年にソビエト連邦共和国によって開発され月面着陸を行った無人探査機のルナ2号から始まり(以降、1976年のルナ24号までに複数回の着陸を実現)、その後1961年から1972年にかけてNASAが実施したアポロ計画、2013年と2019年にそれぞれ月面着陸を果たした中国の嫦娥3号・4号等、過去にも様々な開発事例が存在しており、ランダー開発技術は原理的に既に確立されたものであります。特にアポロ計画で開発されたランダーは合計6回の有人月面着陸を成功させましたが、これを契機に、ランダーの様な大規模システムを高い品質を保ちながら確実に効率よく開発するための手法として、「段階的プロジェクト計画」(Phased Project Planning:PPP)がNASAによって生み出されました。以降、この手法をベースとして多数の民間企業による人工衛星の開発が行われており、JAXAもまた「段階的プロジェクト計画法におけるシステムエンジニアリング活動」として同様の手法を提唱しています。
図5:システムエンジニアリング活動に準拠した開発の工程
(JAXA発行「ライフサイクルにおけるプロセスのアウトプット/アクティビティの例」を元に当社作成)

|
技術 審査 |
MDR Mission Definition Review |
SRR |
SDR System Definition Review |
PDR Preliminary Design Review |
CDR Critical Design Review |
PSR Pre- Shipment Review |
LRR Launch Readiness Review |
|
目的 |
ミッションの意義・目的・成功要件・コスト等、ミッション定義の妥当性を確認する審査会 |
ビジネス要件とシステム要件の整合性を確認の上、システム設計開始を承認する審査会
|
システム仕様、及びそれに対する検証計画の妥当性、基本設計フェーズに向けた技術・体制・計画等の一連の準備が完了されていることを確認する審査会 |
仕様値に対する設計結果、設計検証計画の実現性を確認する審査会 |
製造と試験の詳細設計と検証計画が適正かを、これまでに実施した試作評価、熱構造特性の評価、電気機械設計等の評価を活用して確認する審査会 |
試験結果の確認及び、打上場への輸送承認を行う審査会
|
ロケットへのインテグレーション作業終了の確認及び、打上げと初期運用への移行承認を行う審査会 |
本手法の概要は、開発全体を複数のフェーズに区分し、各フェーズで行うべき作業内容を段階的に定義しながら、それぞれのフェーズにおける結果を審査により評価し、次フェーズへの移行可否を判断しながらフェーズを進めていくものであり、これにより可能な限りの不具合・エラー等を事前に検知し、ミッションまでに確かな開発品質へと高めていく手法です。当社のランダー開発もまた、機能面において人工衛星と近似する部分を多く有しているため、基本的には既存の人工衛星開発のプロセスである「段階的プロジェクト計画法におけるシステムエンジニアリング活動」を踏襲して進められています(詳細な当社の開発状況については、後記「第2 事業の状況 1.経営方針、経営環境及び対処すべき課題等 (4)経営上の目標の達成状況を判断するための客観的な指標等」をご参照下さい)。
また上記「システムエンジニアリング活動に準拠した開発の工程」は一般的な人工衛星開発のプロセスを示したものですが、これを基礎としつつ、民間企業等の人工衛星の開発現場においては、そのプロジェクトの複雑性や新規性に拠って、必要とされる審査プロセスを柔軟にアレンジされるケースも一般的です。例えば、新規開発ではない量産型の人工衛星の製造等の場合、既存設計は過去の物を踏襲し、プロジェクト開始後即座にPDRを実施の上、フェーズCへ移行するケースも存在します。当社の場合も、ミッション2の開発においては基本的にミッション1と類似する設計となることから、ミッション1よりも比較的短期のプロセスを敷く計画です。
3.外部の開発パートナーの積極的な活用
当社は経験豊富なエンジニア陣による「段階的プロジェクト計画法におけるシステムエンジニアリング活動」に万全を期すことで、確かな開発品質を実現させていく計画ですが、技術実証ミッションを遂行する上では外部パートナーの積極的な活用にも取り組んでおります。中でもランダー固有の開発点として、以下の二点については外部の専門プレーヤーの協力を積極的に活用しております。
・微小重力下で月面着陸姿勢を制御可能な大型推進システムの開発
・月面着陸を精度高く行うための着陸制御システムの開発
推進システムについては、宇宙空間における推進システムの開発における長年の実績を有する、欧州大手の航空宇宙企業であるエアバスから分離独立したAriane Group社から、推進系システムの設計協力(レビュー等)を得つつ、基幹部品であるスラスター・バルブ・配管等を調達し、推進系システムの組立も同グループの工場を賃借し行う等、緊密な協力関係を構築しております。なお、当社ミッション1及びミッション2については同様の協力関係を現時点で想定しておりますが、ミッション3については米国子会社をランダーの開発拠点とし、NASAによる月面への輸送サービス委託するプログラムであるCLPSへ採択されサービス提供を実行することから、CLPSの要求事項であるDomestic Source Requirements(US内製品の使用)の条件を満たす必要があり基本的に米国企業からの部材調達を実施いたします。
着陸制御システムの開発については、1960年代から70年代にかけてのアポロ計画でランダーの同システムの開発を担当した米国のドレイパー研究所(本社:米国マサチューセッツ州)に委託をしております。同社との契約関係により、当社は2028年6月末までの期間、地球以外の惑星に500kg以下のペイロードを着陸させる能力を持つ宇宙機への利用に関して、同社が開発する着陸制御システムを独占的に使用する権利を保有しています。
また、前述のとおり、当社グループは、打上ロケットの自社開発は行わず、既に市場でサービス提供を行っている打上プロバイダーと契約の上、打上サービスを購買してまいりますが、現時点でミッション1からミッション3までについて、SpaceX社との間で打上契約を締結しております。同社は、足許で年間20回超のロケット打上げを実施する打上プロバイダーであり、過去の打上げの成功確率としても約98%と極めて信頼性の高い実績を持つパートナーです。これらの外部の専門プレーヤーの協力を積極的に活用することで、当社はより着実なミッションの成功を目指してまいります。
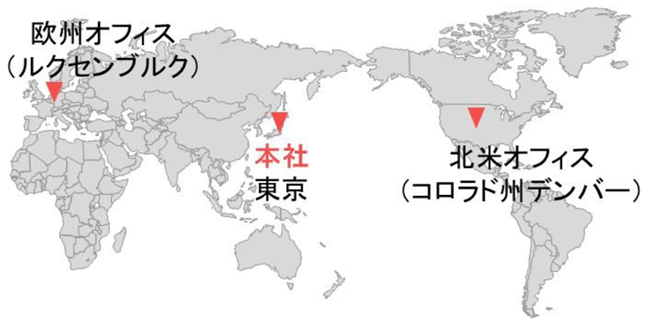
<開発・営業におけるグローバルネットワーク>
上述のとおり、当社グループでは、グローバルなエンジニア人材による「段階的プロジェクト計画法におけるシステムエンジニアリング活動」や海外の外部パートナーの積極的な活用により技術実証ミッションを遂行しております。これを実現する上では、世界中の優秀なエンジニアを獲得することが必要となります。当社グループでは、東京の本社にミッション1及びミッション2のランダーの開発拠点を置く他、米国デンバーの子会社ではミッション3で利用予定の大型化したランダーの開発拠点を、またルクセンブルク大公国の子会社ではローバーの開発拠点を置く等、グローバルに開発部隊を配置し、それぞれの拠点の強みを活用しております。またそれぞれの拠点は、日本のJAXAや米国NASA、欧州のESA等の重要な宇宙機関と物理的距離を近く取ることにより、各地での月面開発ニーズの吸い上げを行っております。
また顧客開拓の観点においても、当社は世界各国において、宇宙機関や民間企業の顧客需要を開拓していく上でも、グローバルなネットワークを構築し、各拠点営業人員を配置しております。欧州においては子会社ispace EUROPE S.A.の従業員が、ESAが実施する月の水資源探査プロジェクトのサイエンスチームに選出される等、当社グループは、民間による月面開発の事業化に取り組むグローバル企業として、国内外から認知されております。
図6:当社グループのグローバルネットワーク
<長期ビジョン>
当社グループが掲げる「Expand our planet. Expand our future.」には、月を人類が宇宙内で活動する上でのエネルギー補給基地として活用し、2040年を目途に「地球と月がひとつのエコシステムとなるエネルギー経済圏を創出する」というビジョンを実現させる意思が込められています。この経済圏を具現化した構想として、当社グループは2040年に1,000人が月に暮らし、年間1万人が地球との間を往来することを想定した月面上の都市「Moon Valley 2040」の構想を併せて掲げています。
月を「エネルギー補給基地」として活用する上で鍵となるのが、月における水の存在です。近年の調査で月には水資源が存在することが明らかとなっており(*)、そのサイズは数億~60億トン(*)とも言われ、その分布状況や分量の確定に更なる調査と分析が必要とされています。また月には水資源だけでなく、鉱物資源やヘリウム3も存在する可能性があり、これらの資源の利用可能性にも注目が集まっています。
* 出所:Direct evidence of surface exposed water ice in the lunar polar regions, PNAS https://www.pnas.org/content/115/36/8907
* 出所:Dr.David R. Williams, https://nssdc.gsfc.nasa.gov/planetary/text/lp_pr_19980903.txt
水から電気分解された水素と酸素は、液体水素・液体酸素として、近年の宇宙開発におけるロケット推進燃料の1つとして利用されています。将来的に月の水資源を有効活用し、エネルギー源の生成からロケットの推進燃料としての利用までを、一気通貫して月で行うことができれば、地球の1/6ともされる微小重力下の月から抜け出し宇宙空間を移動する燃料輸送コストは、地球の重力から抜け出すことが所与となっていた従来の燃料輸送コストに比べて、大幅に引下げることが可能になると考えられております。これが現在、世界中の注目が月に集まる最大の背景と考えられます。
図7:エネルギー補給基地としての月の可能性
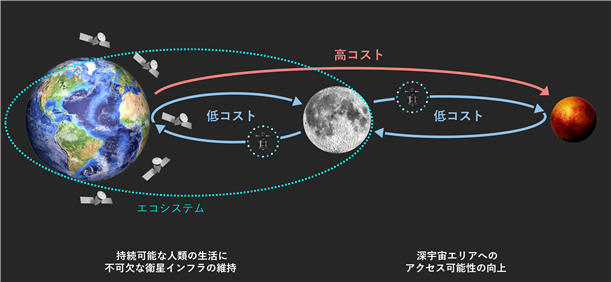
小惑星・火星等の深宇宙探査は、科学的観点から人類に大きな利益をもたらすと考えられており、将来的にもより高頻度で実施されることが期待されています。また、現在地球の周回にはGPS(全地球測位システム)・気象観測衛星等、数千機もの人工衛星が存在し、近い将来にはメガ・コンステレーション(大規模な人工衛星群)によるインターネット接続も計画されている等、これらの衛星が地球上の人類の生活を維持する上で必要不可欠なインフラになっており、長期的な維持利用を見据えて燃料補給等のメンテナンスをいかに行うかが課題です。
将来的に更に増大することが見込まれる深宇宙探査のための移動燃料、また人工衛星の活動維持のための燃料を、すべて地球上から賄うことは、特に地球の重力から抜け出す際に膨大なエネルギーコストが必要になることを考えれば、深刻な課題と言えます。本課題を解消するために月を人類が宇宙内で活動する上でのエネルギー補給基地として活用し、2040年を目途に「地球と月がひとつのエコシステムとなるエネルギー経済圏を創出する」ことを目指す当社のビジョンは、長期的に人類の地球上の生活を持続させることに繋がる世界的に重要な施策の1つと言えます。
<ビジョン実現に向けたロードマップ>
当社グループでは、前述の「Moon Valley 2040」の実現に向けたロードマップを下記図8のように大きく2つのフェーズに分けて整理しております。
図8:「Moon Valley 2040」の実現に向けたロードマップ
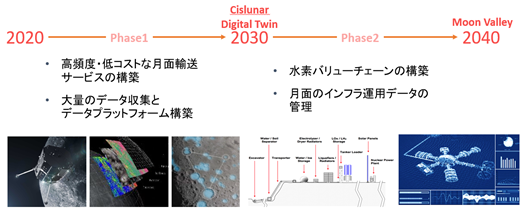
フェーズ1では、当社グループは月の水資源やその他資源の商業的価値に着目し、低価格・高頻度な月面輸送を行うプラットフォームを構築するとともに、月面資源のデータマッピングを行い、月ビジネスに参入するすべての顧客(政府宇宙機関・研究機関・民間企業等)に有益な月のデータ(画像データ・環境データ・資源情報等)を提供することを計画しております。続くフェーズ2では、月面資源探査/開発プラットフォームを構築するために、月の水資源からロケット推進燃料を生成する事業パートナー企業とのアライアンス構築に取り組む計画です。
これらを通じて、2040年代には地球と月がひとつのエコシステムとなるエネルギー経済圏「Moon Valley 2040」を創造していきます。
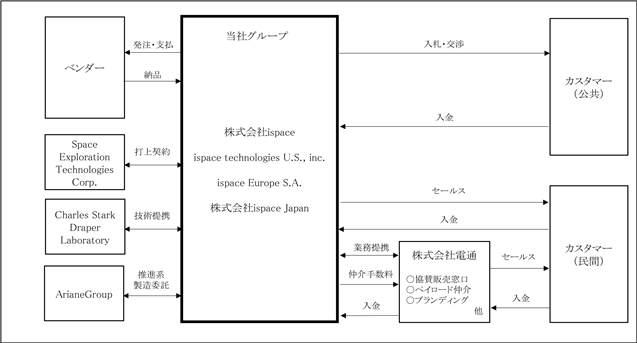
[事業系統図]
当社グループの事業系統図は、次のとおりであります。
4【関係会社の状況】
|
名称 |
住所 |
資本金 |
主要な事業の内容 |
議決権の所有割合(又は被所有割合)(%) |
関係内容 |
|
(連結子会社) |
|
|
|
|
|
|
ispace EUROPE S.A. (注)2.3.4 |
ルクセンブルク大公国 ルクセンブルク市 |
40,000ユーロ |
月面開発事業 |
100 |
役員の兼任 4名 資金の援助 |
|
ispace technologies U.S., inc.(注)2 |
米国 コロラド州デンバー |
500,000.01米ドル |
月面開発事業 |
100 |
役員の兼任 1名 資金の援助 |
|
その他1社 |
|
|
|
|
|
(注)1.有価証券届出書又は有価証券報告書を提出している会社はありません。
2.ispace EUROPE S.A.及びispace technologies U.S., inc.は特定子会社に該当しております。
3.ispace EUROPE S.A.については、売上高(連結会社相互間の内部売上高を除く。)の連結売上高に占める割合が10%を超えております。
主要な損益情報等 (1)売上高 100,856千円
(2)経常損失 34,176千円
(3)当期純損失 34,176千円
(4)純資産額 △115,822千円
(5)総資産額 209,554千円
4.ispace EUROPE S.A. は、債務超過の状況にあり、債務超過の額は2021年12月31日時点で115,822千円であります。
5【従業員の状況】
(1)連結会社の状況
|
2023年1月31日現在 |
|
|
従業員数 |
|
|
|
( |
(注)1.従業員数は就業人員(当社グループからグループ外への出向者を除き、グループ外から当社グループへの出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員、季節工を含む。)は、最近1年間の平均人員を( )外数で記載しております。
2.当社グループは、月面開発事業の単一セグメントであるため、セグメント別の記載を省略しております。
(2)提出会社の状況
|
|
|
|
|
2023年1月31日現在 |
|
従業員数(人) |
平均年齢(歳) |
平均勤続年数(年) |
平均年間給与(円) |
|
|
|
( |
|
|
|
(注)1.従業員数は就業人員(当社から社外への出向者を除き、社外から当社への出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員、季節工を含む。)は、最近1年間の平均人員を( )外数で記載しております。
2.平均年間給与は、賞与及び基準外賃金を含んでおります。
3.当社は、月面開発事業の単一セグメントであるため、セグメント別の記載を省略しております。
(3)労働組合の状況
当社グループにおいて労働組合は結成されておりませんが、労使関係は円満に推移しております。