第二部【企業情報】
第1【企業の概況】
1【主要な経営指標等の推移】
提出会社の状況
|
回次 |
第11期 |
第12期 |
第13期 |
第14期 |
第15期 |
|
|
決算年月 |
平成23年12月 |
平成24年12月 |
平成25年12月 |
平成26年12月 |
平成27年12月 |
|
|
売上高 |
(千円) |
|
|
|
|
|
|
経常利益又は経常損失(△) |
(千円) |
|
|
|
|
△ |
|
当期純利益又は当期純損失(△) |
(千円) |
△ |
|
|
|
△ |
|
持分法を適用した場合の投資損失(△) |
(千円) |
|
|
|
|
△ |
|
資本金 |
(千円) |
|
|
|
|
|
|
発行済株式総数 |
|
|
|
|
|
|
|
普通株式 |
(株) |
|
|
|
|
|
|
A種優先株式 |
(株) |
|
|
|
|
|
|
B種優先株式 |
(株) |
|
|
|
|
|
|
C種優先株式 |
(株) |
|
|
|
|
|
|
D種優先株式 |
(株) |
|
|
|
|
|
|
純資産額 |
(千円) |
|
|
|
|
|
|
総資産額 |
(千円) |
|
|
|
|
|
|
1株当たり純資産額 |
(円) |
△ |
△ |
△ |
△ |
|
|
1株当たり配当額 |
(円) |
|
|
|
|
|
|
(うち1株当たり中間配当額) |
( |
( |
( |
( |
( |
|
|
1株当たり当期純利益金額 又は当期純損失金額(△) |
(円) |
△ |
|
|
|
△ |
|
潜在株式調整後1株当たり当期純利益金額 |
(円) |
|
|
|
|
|
|
自己資本比率 |
(%) |
|
|
|
|
|
|
自己資本利益率 |
(%) |
|
|
|
|
|
|
株価収益率 |
(倍) |
|
|
|
|
|
|
配当性向 |
(%) |
|
|
|
|
|
|
営業活動によるキャッシュ・フロー |
(千円) |
|
|
|
|
△ |
|
投資活動によるキャッシュ・フロー |
(千円) |
|
|
|
△ |
△ |
|
財務活動によるキャッシュ・フロー |
(千円) |
|
|
|
|
|
|
現金及び現金同等物の期末残高 |
(千円) |
|
|
|
|
|
|
従業員数 |
(人) |
|
|
|
|
|
|
(外、平均臨時雇用者数) |
( |
( |
( |
( |
( |
|
(注)1.当社は連結財務諸表を作成しておりませんので、連結会計年度に係る主要な経営指標等の推移については記載しておりません。
2.売上高には、消費税等は含まれておりません。
3.持分法を適用した場合の投資利益については、第11期及び第12期は関係会社が存在しないため、第13期、第14期は子会社1社(株式会社カートモ)を有しておりますが、持分法非適用の非連結子会社であるため、記載しておりません。
4.第12期、第13期及び第14期の潜在株式調整後1株当たり当期純利益金額は、潜在株式のうち発行済優先株式を含めて計算しております。なお、新株予約権が存在するものの、当社株式は非上場であり期中平均株価が把握できないため、潜在株式調整後1株当たり当期純利益金額の計算には含めておりません。第11期及び第15期の潜在株式調整後1株当たり当期純利益金額については、潜在株式は存在するものの、当社株式は非上場であり期中平均株価が把握できないため、また、1株当たり当期純損失金額であるため記載しておりません。
5.第11期及び第15期の自己資本利益率については、当期純損失を計上しているため記載しておりません。
6.株価収益率については、当社株式は非上場であるため、記載しておりません。
7.当社は第14期よりキャッシュ・フロー計算書を作成しておりますので、第11期、第12期及び第13期のキャッシュ・フロー計算書に係る各項目については記載しておりません。
8.第11期については、不採算事業の撤退に伴う特別損失計上の影響により、当期純損失となりました。また、第15期については、研究開発費の増加に伴い、経常損失、当期純損失となりました。
9.第14期及び第15期の財務諸表については、金融商品取引法第193条の2第1項の規定に基づき、新日本有限責任監査法人により監査を受けておりますが、第11期、第12期及び第13期の財務諸表については、「会社計算規則」(平成18年法務省令第13号)に基づき算出しており、新日本有限責任監査法人の監査を受けておりません。
10.当社は、A種優先株式、B種優先株式、C種優先株式及びD種優先株式の取得条項を行使したことにより、平成27年10月21日付でこれらの各種優先株式の全てを自己株式として取得し、対価として普通株式を交付しております。また、同日付の取締役会の決議により、取得した全ての優先株式を消却しております。
11.当社は、平成27年11月30日付で普通株式1株につき2,000株の株式分割を行っております。第14期の期首に当該株式分割が行われたと仮定して1株当たり純資産額、1株当たり当期純利益金額又は当期純損失金額(△)及び潜在株式調整後1株当たり当期純利益金額を算定しております。
12.当社は、平成27年11月30日付で普通株式1株につき2,000株の株式分割を行っております。
そこで、東京証券取引所自主規制法人(現 日本取引所自主規制法人)の引受担当者宛通知「『新規上場申請のための有価証券報告書(Ⅰの部)』の作成上の留意点について」(平成24年8月21日付東証上審第133号)に基づき、第11期の期首に当該株式分割が行われたと仮定して算出した場合の1株当たり指標の推移を参考までに掲げると、以下のとおりとなります。
なお、第11期、第12期及び第13期の数値(1株当たり配当額については全ての数値)については、新日本有限責任監査法人の監査を受けておりません。
|
回次 |
第11期 |
第12期 |
第13期 |
第14期 |
第15期 |
|
|
決算年月 |
平成23年12月 |
平成24年12月 |
平成25年12月 |
平成26年12月 |
平成27年12月 |
|
|
1株当たり純資産額 |
(円) |
△249.92 |
△240.75 |
△55.76 |
△47.42 |
31.60 |
|
1株当たり当期純利益金額又は当期純損失金額(△) |
(円) |
△2.81 |
9.17 |
24.90 |
8.34 |
△3.51 |
|
潜在株式調整後1株当たり当期純利益金額 |
(円) |
- |
1.82 |
5.09 |
2.61 |
- |
|
1株当たり配当額 (うち1株当たり中間配当額) |
(円) |
- (-) |
- (-) |
- (-) |
- (-) |
- (-) |
2【沿革】
当社の代表取締役社長であり創業者である谷口恒(戸籍名:谷口恵恒)は、大学卒業後、自動車の制御機器メーカのエンジニアとしてアンチロックブレーキの開発に携わった後、専門商社でマネージメントと技術営業を学び、インターネット上でコンテンツを流通させる仕組みを提供するIT企業を設立しました。その後、文部科学省所管の科学技術振興事業団(現国立研究開発法人科学技術振興機構、以下、「JST」という)の創造科学技術推進事業(ERATO)の研究成果物である二足歩行の人型ロボット「PINO」に出会い、IT産業の次はRT(Robot Technology)産業の時代がくると想定し、平成13年1月にロボット専業ベンチャーである有限会社ゼットエムピーを東京都港区神宮前に設立しました。
会社の設立後、現在までの沿革は次のとおりとなります。
|
平成13年1月 |
東京都港区神宮前に、有限会社ゼットエムピー(資本金3百万円)を設立 |
|
平成13年6月 |
有限会社を改組し、株式会社ゼットエムピー(現株式会社ZMP)を設立 東京都港区六本木に本社移転 |
|
平成13年7月 |
研究開発用途を目的とした人型二足歩行ロボットPINOを販売開始 |
|
平成14年9月 |
東京都港区三田に本社移転 |
|
平成15年6月 |
JST(国立研究開発法人科学技術振興機構)の研究成果最適移転事業、成果育成プログラムB(略称:独創モデル化)に採択され、視聴覚統合技術の開発を行う |
|
平成16年11月 |
東京都目黒区青葉台に本社移転 |
|
平成17年4月 |
家庭用二足歩行ロボットnuvo販売開始 |
|
平成19年1月 |
自律移動ネットワーク音楽プレーヤーmiuro販売開始 |
|
平成21年6月 |
東京都文京区小石川に本社移転。スケールモデルRoboCar 1/10販売開始 |
|
平成22年8月 |
一人乗りロボットEV RoboCar MV販売開始 |
|
平成24年3月 |
普通車ベースのRoboCar HV販売開始 |
|
平成25年1月 |
プラグインハイブリッドベースのRoboCar PHV販売開始 |
|
平成25年7月 |
株式会社JVCケンウッドと共に移動体通信による車載CANデータのクラウドプラットフォームを活用するテレマティクス事業を共同展開することを目的として、東京都文京区小石川に株式会社カートモを設立(当社出資比率51.0%) |
|
平成26年4月 |
商号を株式会社ZMPに変更 |
|
平成26年7月 |
物流支援を目的とした「CarriRo(キャリロ)」、自動運転コンピュータ「IZAC(アイザック)」の製品発表を実施 |
|
平成27年1月 |
株式会社ハーツユナイテッドグループと共に自動車業界向けのデバッグ及びデータ収集等実験代行に関する事業を共同展開することを目的として、東京都文京区小石川に株式会社ZEG(ゼグ)を設立(当社出資比率51.0%) |
|
平成27年5月 |
株式会社ディー・エヌ・エーと共に自動運転技術を活用した旅客運送事業の実現に向けた研究・開発などを行うことを目的として、東京都渋谷区渋谷にロボットタクシー株式会社を設立(当社出資比率33.4%) |
|
平成27年8月 |
ソニーモバイルコミュニケーションズ株式会社と共に自律型無人航空機による画像撮影とクラウドによる画像データの処理を組み合わせた、産業用ソリューションを開発・提供することを目的として、東京都文京区小石川にエアロセンス株式会社を設立(当社出資比率49.9%) |
|
平成28年2月 |
第2回日本ベンチャー大賞(経済産業省主催)において、「ベンチャー企業・大企業等連携賞(経済産業大臣賞)」を受賞(株式会社ディー・エヌ・エー及びソニーモバイルコミュニケーションズ株式会社と共同受賞) |
|
平成28年8月 |
物流支援ロボット「キャリロ」発売開始 |
3【事業の内容】
当社は、「Robot of Everything 人が運転するあらゆる機械を自動化し、安全で、楽しく、便利なライフスタイルを創造する」をミッションに掲げ、あらゆる産業において最新のロボット技術をもってソリューションを提供することを目指しております。当社は、平成13年の創業以来、二足歩行ロボットや二輪型自律移動ロボット、自動運転技術の研究開発のための実験用車両であるロボットカー等の開発を通じて培った、センシング(認知)技術や制御(判断・操作)技術及びそれらを統合するノウハウを有しており、これを「自律移動ロボットテクノロジー」として、様々な産業分野にソリューションを提供しております。
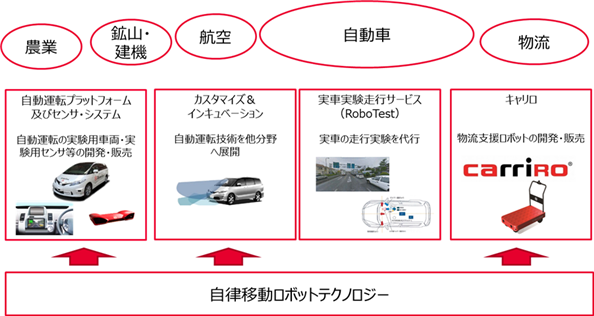
1.事業の概要
当社の事業は自律移動ロボットテクノロジー事業の単一セグメントであり、セグメント情報を記載していないため、事業分野別に記載しております。当社の事業分野は(1)自動運転プラットフォーム及びセンサ・システム、(2)実車実験走行サービス(RoboTest)、(3)カスタマイズ&インキュベーション、(4)キャリロの4分野です。
当社は研究開発フェーズから商品企画やマーケティング、製品化後の改善に至るまでの顧客のそれぞれのフェーズに製品・サービスの提供を行っております。そのため、顧客の研究開発に必要な研究機器の販売、製品化前におけるマーケティング、製品化後の製品改善に係る調査業務などの取引を行うことができます。
当社の事業分野別の製品サービスの具体的な内容は次のとおりです。
(1)自動運転プラットフォーム及びセンサ・システム
当社では完全自動走行システム(レベル4)をゴールとして技術開発を行っており、関連技術を活用した製品を自動車及び部品メーカ、大学等研究機関向けに提供しております。本事業分野における当社の主な製品は「カー・ロボティクス・プラットフォーム(自動運転の実験用車両等)」と「センサ・システム(自動運転の実験用センサ等)」ですが、多くの場合、両製品が組み合わされて使用されます。
「カー・ロボティクス・プラットフォーム」については、「RoboCar 1/10」「RoboCar MV/MV2」「RoboCar
PHV/HV」そして「RoboCar MiniVan」の4製品をRoboCarシリーズとして展開しております。4製品共に、自動運転技術の研究開発のための実験・開発用車両です。ハードとソフトを一貫して提供しており、顧客の研究開発を支援しております。
「センサ・システム」については、画像認識技術と情報解析・走行制御技術を活用した製品を中心に提供しております。
画像認識技術を活用した製品としては、ステレオカメラ「RoboVision2」、単眼カメラの「RoboVision Single」を展開しております。「RoboVision2」は、2つのカメラを同期させて取得した画像から三角測量の原理で距離を取得できるステレオカメラです。高感度CMOSセンサにより低照度環境でも画像を取得でき、ADAS・自動運転車のセンシング(環境認識)の研究開発に活用されております。
情報解析・走行制御技術を活用した製品として、RoboCarシリーズに搭載する自動運転技術開発用コンピュータ「IZAC」を開発しております。「IZAC」はインテル社製CPUを搭載したADASや自動運転技術の研究開発用のコンピュータです。カメラやレーザセンサなどから得られる周辺環境に関する多量の情報処理や、自己位置推定やマッピング、障害物やレーン検知などを行い、経路生成などの判断、車両のステアリングやアクセル・ブレーキの制御を行うことを目的としております。なお、「IZAC」は単体では販売しておらず、RoboCarシリーズに組み込んだ上で販売しております。
また、RoboCarシリーズの開発過程で蓄積した車載ネットワークデータに対する知見により、車載ネットワークデータを取得する車載器の開発・販売、公道やテストコースを走行しデータを収集する実車実験走行サービスを行っております(実車実験走行サービスについては(2)で詳述いたします)。

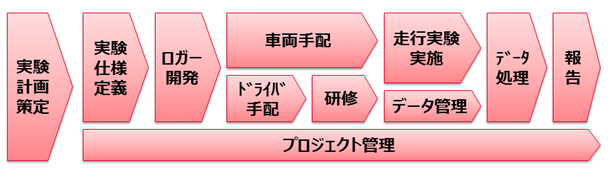
(2)実車実験走行サービス(RoboTest)
公道やテストコースでドライバが実車の走行を行い、車載LAN規格であるCAN(Controller Area Network)情報や、車両の周囲の状況を把握するカメラやレーザセンサの情報、また、ドライバの挙動や状態を計測するモーションセンサや生体センサ等の情報を収集する実験の代行サービスです。
ドライバの手配は子会社である株式会社ZEGに委託しており、年齢や性別、運転歴等の様々な属性のドライバを手配することが可能です。主要顧客は自動車メーカ、部品メーカ、大手電機メーカ及び車載機器メーカです。
また、国内だけではなく、海外でのデータ収集も行っており、本書提出日現在において、欧州37か国でのデータ収集を実施した実績があります。本事業における当社の特徴は、データ収集のためのシステム一式(ハードウェア及びソフトウェア)を自社で開発している点及び実験計画からデータ分析まで一貫した実施が可能である点にあります。研究開発フェーズでは製品やシステムの評価、商品企画やマーケティングフェーズでは一般ドライバの運転・操作データの収集やアンケートなどを行っております。
実車実験走行サービスの実施範囲
(3)カスタマイズ&インキュベーション
カスタマイズ&インキュベーションでは、自動車の自動運転技術の開発で培った技術、ノウハウを活用し、主に自動車業界におけるシステムのカスタマイズを行っております。具体的には、自動車メーカの所有する車両にセンサやコンピュータを搭載し、自動運転技術の実験車両としてシステム構築を行ったり、自動車メーカ向けに、ドライバの運転操作を評価するためのシステムの構築など、自動車/部品メーカのADAS技術や自動運転技術の研究開発に必要なシステムの開発を行っております。また、業務用車両を手掛ける移動体メーカ(自動車、商用車、建設機械、農業機械、物流搬送機器、屋外作業機械等)向けに、作業用機械の自動化の試作システムの構築など、自動化や自動化のためのセンシングシステムの開発等を行っております。また、関係会社であるロボットタクシー株式会社向けに、自動運転技術に係る技術開発支援サービスの提供も行っております。
なお、ソニーモバイルコミュニケーションズ株式会社と合弁会社「エアロセンス株式会社」(ソニーモバイルコミュニケーションズ株式会社50.005%(平成28年8月にソニー株式会社に移動)、当社49.995%出資。当社関連会社)を平成27年8月3日に設立し、飛行計画から画像処理まで全て自動で行える自律型無人航空機(ドローン)による事業展開を開始しております。
(4)キャリロ
当社では、物流業界での人手不足問題解決に貢献することを目的に、荷物の運搬に用いる台車に当社の技術を
適用した物流支援を目的としたロボット「キャリロ」を開発し、平成28年8月から発売開始しております。
キャリロは、汎用台車にロボット技術を適用し、①ジョイスティックを操作すると、前後左右に走行し、力を使うことなく荷物を運ぶことができる「ドライブモード」、②作業者や親機となるキャリロに追従する「カルガモモード」を搭載しております。これらの機能により、作業員の負担の軽減や、運搬量の増加や運搬の自動化による生産性の向上を目指していきます。
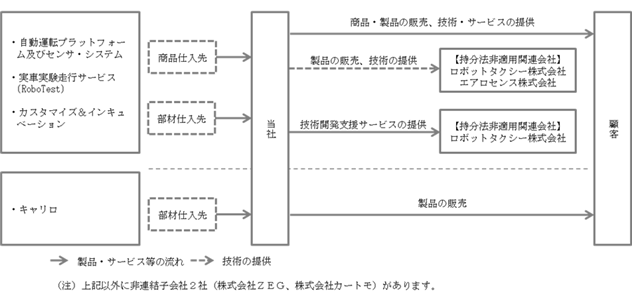
[事業系統図]
以上述べた事項を事業系統図によって示すと次のとおりであります。
2.事業の特徴
当社の特徴は「自動車技術に関する知見と自動車へのロボット技術の応用ノウハウ」、「独立系企業としての自由度の高さ」、「アプリケーションの多様化・事業の多角化」にあります。
①自動車技術に関する知見と自動車へのロボット技術の応用ノウハウ
当社では、自動車内部のネットワーク規格であるCAN(Controller Area Network)情報を収集する車載器と、CAN情報を介して自動車の制御を可能とするソフトウェア技術を独自に開発しております。これらを自動車に搭載するに当たり、インターフェースや通信機能を搭載したコントローラボックスや、ハンドルやブレーキを機械ではなく電気信号(バイワイヤ)で操作するための設計・開発も自社で行っております。また、周囲環境をセンシングする画像認識モジュールや3D、2Dのレーザレンジセンサ、ミリ波レーダ、GPSセンサ等の異なる方式の計測データから物体を認識し、位置等の正しいデータを推定する統合技術を保有しております。これまでの開発で培ったこれらの技術を利用して自動運転に向けてのシステムの設計開発を行っております。当社は、平成25年には、ITS世界会議、東京モーターショーにおいて当社製品RoboCarの自動運転走行デモを実施し、平成26年より「新あいち創造研究開発補助金事業」の一環として名古屋大学等と共に名古屋市街地で公道での走行実験を実施してきました。また、平成27年には、関係会社であるロボットタクシー株式会社が神奈川県藤沢市において実施した公道での実証実験に関する車両を提供いたしました。
②独立系企業としての自由度の高さ
当社は独立系企業として自由度の高い取引関係を構築しております。そのため、国内の様々な自動車メーカや部品メーカ、車載機器メーカ等へ技術やノウハウを供給しており、系列に縛られることのない多様なソリューションを提供しております。
③アプリケーションの多様化・事業の多角化
当社はロボット開発で培った技術を活用し、自動車をはじめ、物流、航空、鉱山・建機、農業等、他の分野に展開しております。自動車分野においてはADAS・自動運転技術開発向けの実験車両やセンサ・システムなどの製品を通じた技術提供の実績を重ね、近年では顧客の自動運転技術の研究開発を支援する事業や、走行データを収集する事業(実車実験走行サービス)を行っており、物流分野においては、物流支ロボット「キャリロ」を展開しております。
3.用語の定義
前項「2 沿革」にて記載している当社開発製品等についての詳細な説明を以下に記します。
また、本項「3 事業の内容」において、当社の事業に関わる専門用語が頻出しております。記載する用語によっては、一般的な意味とは異なる意味合いで使用している用語もあることから、記載内容に対する理解を容易にするため、また、正しい理解をしていただくために、本書で使用する用語の定義についても、併せて以下に記します。
|
用語 |
用語の定義 |
|
PINO |
文部科学省所管・科学技術振興事業団(現国立研究開発法人科学技術振興機構:JST)で平成12年4月に生まれた人型ロボット。当社はJSTからその技術移転を受けて平成13年に設立された。平成15年には当社オリジナルのPINOVer.2がリリースされた。高さ70cm、重量5.5㎏のPINOは、童話「ピノキオ」をモチーフに、人との共生を視野に入れてデザインされている。 |
|
nuvo |
当社が平成17年にリリースした、一般家庭向け二足歩行ロボット。CPU・マザーボードは株式会社ルネサステクノロジ(現 ルネサス エレクトロニクス株式会社)が担当、製造はセイコークロック株式会社が行い、当社がコア技術の開発・全体設計を行った。高さ39cm、重量2.5㎏で無線LANを搭載し、赤外線リモコンと音声認識で操作ができる。 |
|
miuro |
ロボット技術を搭載したネットワーク・ミュージック・プレーヤー。各種センサにより二輪で自律移動して、音楽に合わせてダンスするように動くこともできる。ネットワーク内のPCにある音楽を再生することも、ミュージックプレーヤを搭載接続して再生することもできる。音は株式会社JVCケンウッドの音質マイスターが練り上げ、デザインも著名なグラフィックプロデューサーが担当して、デザイン・音質・ロボット技術を融合した商品。 |
|
ロボットEV |
電気自動車をベースにした自律走行ができる車(自動運転車)。当社では自動運転の実験用車両として、RoboCar MV、RoboCar MV2があり、各種のセンサオプションを用意して多様な研究開発に対応できるようになっている。 |
|
用語 |
用語の定義 |
|
JST(国立研究開発法人科学技術振興機構) |
科学技術の振興を目的として設立された文部科学省所管の国立研究開発法人。科学技術に関する政策達成型基礎研究、産官学連携による企業化開発、国際共同研究などを行い、我が国における科学技術情報の中枢的機関としてその流通を担うことで、科学技術の振興を図ることを目的としている。昭和32年の日本科学技術情報センターに始まり、平成8年に科学技術振興事業団となり、平成15年に科学技術振興機構となって現在に至る。 |
|
ロボティクス |
工学の一分野。制御工学を中心に、センサ技術・機械機構学などを総合して、ロボットの設計・製作及び運転に関する研究を行う。ロボット工学。 |
|
プラットフォーム |
あるソフトウェアやハードウェアを動作させるために必要な、基盤となるハードウェアやOSミドルウエアなどのこと。また、それらの組み合わせや設定、環境などの総体を指すこともある。 |
|
ロボットカー |
人間の運転なしで自律走行を行うことを目的として製造された自動車。日本では「自動運転車」とも呼ばれている。 |
|
自動運転システム |
ロボットカーの基幹となる自動運転のための動力制御装置や外環境測定装置を司り、自動運転のための制御を統率する装置。 |
|
自動化レベル |
内閣府が自動車の自動走行レベルとして、以下のように定義している(米国運輸省の定義もほぼ同様である)。 レベル1:安全運転システム(加速・操舵・制動のいずれかを自動車が行う状態) レベル2:準自動走行システム(加速・操舵・制動のうち複数の操作を同時に自動車が行う状態) レベル3:準自動走行システム(加速・操舵・制動を全て自動車が行い、緊急時のみドライバが対応する状態) レベル4:完全自動走行システム(加速・操舵・制動を全てドライバ以外が行いドライバが全く関与しない状態) (出典:「SIP(戦略的イノベーション創造プログラム)自動走行システム 研究開発計画」(内閣府 政策統括官(科学技術・イノベーション担当))。平成26年5月) |
|
ITS |
高度道路交通システム(Intelligent Transport Systems)。交通事故や渋滞、環境汚染対策等、道路交通に伴う課題を解決するために、道路、車、そして人との間で情報のやり取りを行うシステム。 |
|
IoT |
インターネットオブシングス、モノのインターネット(Internet of Things)。コンピュータに限らず、家電製品や自動車等世の中のあらゆる物(モノ)をインターネットに接続し、情報をやり取りすること。あらゆるモノの稼働状況や状態に関わるデータの入手が可能になるだけではなく、モノを動かす人の動きもデータ化することが可能。 |
|
モーションセンサ |
動体検知を目的としたセンサ。検知方法には様々あり、加速度、ジャイロ、地磁気センサによる動作検知によるもの、カメラを用いた外部からの観測検知によるもの等が存在する。 |
|
生体センサ |
主として人体に取り付け、心拍や筋電位などの生体電気等の情報を読み取ることを目的としたセンサ一般を指す。 |
|
ミリ波レーダセンサ |
ミリ波帯の電波を用い特定の距離や相対速度の検知などに用いられているレーダセンサ。電波を利用することから霧の中や降雨・降雪時においても使用可能であり、最近の市販乗用車において衝突軽減機能、衝突安全検知機能、また制動補助機能を目的として搭載されている機種が増加している。 |
|
レーザレンジセンサ |
レーザ光による光距離計と呼ばれるレーザレンジファインダー(Laser Range Finder)を利用した外環境測位センサ。特定の距離において精度の高い外環境測位が可能。 |
|
ステレオカメラセンサ |
複眼によって異なる方向から対象物を同時に撮影することにより、奥行き情報の記録を行なうことが出来るカメラを指し、このステレオカメラからの情報を用いて画像処理を行い、センサとして利用できるようにしたもの。 |
|
用語 |
用語の定義 |
|
GNSS/GPSセンサ |
GNSS:グローバル・ナビゲーション・サテライト・システム(Global Navigation Satellite System、全世界衛星測位システム)。衛星を使った位置計測システム。 GPS:グローバル・ポジショニング・システム(Global Positioning System、GPS)。アメリカ合衆国によって運用される衛星を使った位置計測システム。 |
|
データロガー |
計測データの保存を行う機器。 |
|
CAN情報 |
CAN(Controller Area Network)は、耐ノイズ性の強化を考慮して設計され、相互接続された機器間のデータ転送に使われる規格。機器の制御情報の転送用として普及しており、輸送用機械、工場、工作機械などのロボット分野においても利用されている。自動車においては、速度、エンジンの回転数、ブレーキの状態、故障診断の情報などの転送に使用されている。 |
|
ADAS(先進運転支援システム) |
自動車を制御する複雑なプロセスにおいて、ドライバの支援や補完、さらには代理まで行うよう開発されたシステム。ADAS(Advanced Driving Assistant System)として、適応走行制御、死角モニタリング、車線逸脱警報、ナイト・ビジョン、車線維持支援、ハンドルの自動制御やブレーキの自動制御も行える衝突警報といった機能が挙げられる。ADASの予知機能は、車両の動きを部分的に制御することで、事故を防ぐよう設計されている。 |
4【関係会社の状況】
当社は最近事業年度において、子会社2社(株式会社カートモ及び株式会社ZEG)を所有しておりますが、いずれも非連結子会社であるため、記載を省略しております。
また、平成27年12月期において、関連会社2社(ロボットタクシー株式会社及びエアロセンス株式会社)を設立しておりますが、いずれも持分法を適用していない関連会社であります。ロボットタクシー株式会社及びエアロセンス株式会社の状況については、「第2 事業の状況 4 事業等のリスク(7)関連会社に関するリスク」に記載しているため、記載を省略しております。
5【従業員の状況】
(1)提出会社の状況
|
平成28年9月30日現在 |
|
従業員数(人) |
平均年齢(歳) |
平均勤続年数(年) |
平均年間給与(千円) |
|
49(13) |
36.0 |
2.8 |
5,087 |
|
部門の名称 |
従業員数(人) |
|
|
技術開発部 |
36 |
( 9) |
|
営業部 |
5 |
( -) |
|
新規事業推進室 |
2 |
( -) |
|
管理部 |
6 |
( 4) |
|
合計 |
49 |
(13) |
(注)1.従業員数は就業人員(当社から社外への出向者を除き、社外から当社への出向者を含む。)であり、臨時雇用者数(パートタイマー、人材会社からの派遣社員を含む。)は、最近1年間の平均人員を( )外数で記載しております。
2.平均年齢、平均勤続年数及び平均年間給与は、当社から社外への出向者及び社外から当社への出向者を除いて算出しております。
3.平均年間給与は、賞与及び基準外賃金を含んでおります。
4.当社は自律移動ロボットテクノロジー事業の単一セグメントであるため、セグメント別の記載を省略しております。
(2)労働組合の状況
当社の労働組合は、結成されておりませんが、労使関係は安定しております。